平成20年度採択
物流と市民生活の安全に貢献するトレーラートラック横転限界速度予測システムの社会実装

実装責任者 東京海洋大学 海洋工学部 教授 渡邉 豊
研究の概要
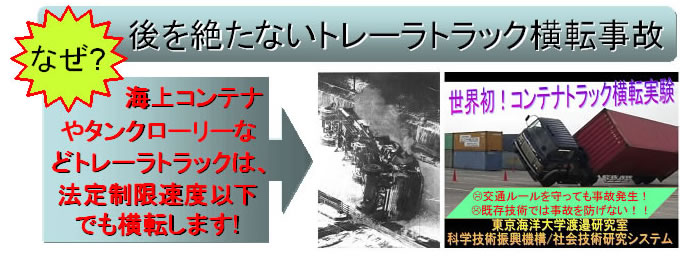
海上コンテナやタンクローリーを典型とするトレーラトラックは、法定制限速度以下でも横転します。
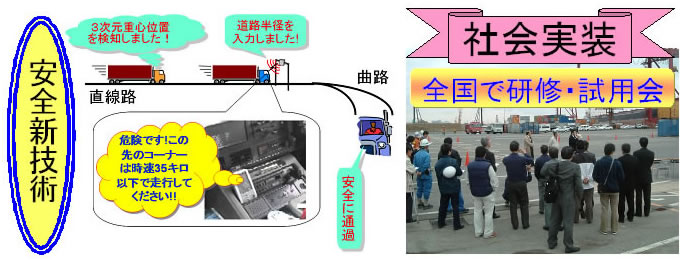
この問題を解決する画期的な技術が、トレーラトラック横転限界速度予測システム(※)です。
本研究は、このシステムを社会実装し横転事故を未然に防ぐために、トレーラトラック輸送に対する正しい知識を、全国の市民団体、物流業界、行政担当者、そして、議員の方々に提供してゆきます。
※JST/RISTEX「科学社会と人間」平成16年度採択公募型研究開発成果
第2回モノづくり連携大賞・準大賞受賞