情報・システム研究機構 国立情報学研究所(NII、所長:喜連川 優、東京都千代田区)のアーキテクチャ科学研究系 准教授 石川 冬樹(イシカワ フユキ)の研究チームは、科学技術振興機構(JST、理事長:濵口 道成、東京都千代田区)の戦略的創造研究推進事業 ERATO蓮尾メタ数理システムデザインプロジェクト(ERATO MMSD、研究総括:NII アーキテクチャ科学研究系 准教授、蓮尾 一郎)のもと、自動車における自動運転の経路計画プログラムから危険動作を自動検出する手法を開発しました。本手法は、マツダ株式会社※1)の研究用モデルをもとにして開発したものです。
本手法では、経路計画プログラムに対しさまざまなシナリオを生成しながら検査し、衝突事故が起きるシナリオを検出する自動テスト技術において、自車としては避けようもない衝突事故が起きるシナリオを検出してしまう課題を解決しました。これは、経路計画プログラムで危険な動作を引き起こすシナリオのうち、自車の動作修正で衝突を回避可能なシナリオだけを自動検出できることを意味します。そのため、開発者が大まかなシナリオ状況を指定するだけで、問題点を検出できるようになります。
本研究成果は、2020年10月24日(現地時間)からポルトガルで開催されるソフトウェアテストについてのフラッグシップ国際会議ICST 2020※2)の産業応用トラックで発表されます。
本研究は科学技術振興機構 戦略的創造研究推進事業 ERATO蓮尾メタ数理システムデザインプロジェクト(JPMJER1603)の一環で行われました。本研究では、マツダ株式会社から提供された経路計画プログラムを用いており、ドイツ・ミュンヘン工科大学およびノルウェー・シミュラ研究所との共同研究を行っています。
<背景>
自動車の自動運転で最も重要な機能の1つは、刻一刻と変化する周辺の状況を踏まえて自車が進む方向と速さを定める経路計画です。歩行者や他車などへの衝突事故を防ぐ安全性だけではなく、運転の快適さや交通ルール遵守などの複数の観点を考慮して最適な経路を定めていきます。経路計画のプログラムでは、歩行者が飛び出してくる場合や路上駐車がある場合などのさまざまなシナリオを設定し、全シナリオで経路計画機能が十分に動作するのか、シミュレーションにより検査を行う必要があります。しかし無数に想定されるシナリオの中から、自車の危険な動作につながる(経路計画機能の問題点を顕在化させる)ようなシナリオを手動でうまく設定することは困難です。このため、危険な動作が発生するシナリオを効果的・効率的に見つけるため、さまざまなシナリオを生成しながら賢く探る自動テスト技術が必要となっていました。
無数のシナリオの中から問題が発生するシナリオを賢く探し出す一般的な技術として、「サーチベースドテスティング」や「反例探索」と呼ばれる手法があります。経路計画プログラムにこれらの手法を使う場合は、各シナリオのシミュレーション結果から動作の危険度を算出し、その危険度がより高くなるようにシナリオの変更を繰り返して探索します。この探索から、他車に高速で衝突するなどの危険な動作を引き起こすシナリオをAI(人工知能)の技術を使って自動検出します。経路計画プログラムとAIが「対決」するゲームに例えれば、AIが歩行者や他車の配置や動きなどのシナリオをうまく設定して、衝突事故が起きるとゲームの勝利者になるように挑ませているともいえます。
しかし、自動運転のように実世界を扱うシステムにこの技術を使うと、非現実的なシナリオを作ってしまうという課題があります。例えば、他車の位置や動きや障害物などの状況を踏まえると、自車としては他車との衝突が避けようがないようなシナリオです。一方で、現実的に考えるべきシナリオとは何であるのか、どういうシナリオなら自車に衝突の責任がないのか、明確な基準を全て書き出すことは不可能です。さらに、シナリオを作成する条件をむやみに限定してしまうと、他車がやや乱暴な運転をする場合など、例外的であっても現実的なシナリオがテストから漏れてしまう可能性もあります。
<研究手法・成果>
本研究チームは特に自動運転システムを対象とし、このような高度な自動テスト生成の技術に重点的に取り組んできました。具体的な仕組みとしては、AIの一分野である「進化計算」の技術を用い、生物の進化を計算機内で模倣する方法を研究しています。より危険性が高い動作を引き起こしたシナリオほど「より強い生き物」と見なし、淘汰、そして交配や突然変異による進化を模倣した計算を行うことで、「非常に強い生き物」、つまり非常に危険性が高い動作が発生するシナリオを探索する方法です。
本研究では、この進化計算を用いた手法を改良することで、非現実的なシナリオを生成してしまう課題を解決し、現実的かつ危険な動作を引き起こすシナリオを自動検出する手法を開発しました。危険性が高い動作、特に衝突を引き起こすシナリオを探索する際に、その衝突を回避できる経路計画プログラムの微修正が可能かも同時に検出します。この新手法では、「このシナリオにおいて今の経路計画プログラムでは衝突が起きるが、例えばある設計パラメーター(乗り心地など)をわずかに設定変更すると、同じシナリオでも衝突が起きない経路が選ばれる」といったシナリオを検出できます。
このように検出したシナリオは、「この衝突は避けようがないものではなく、この衝突を起こさないよう経路計画プログラムの修正が必要である」と安全性に示唆を与えるものになります。このように本手法では、開発者が現実的な想定について細かに明確に書き出す必要がなく、対処が必要となる問題点を自動検出できます。
また、本手法では、ミュンヘン工科大学との協働により、特定の状況に絞ったシナリオの探索も行っています。自車が他車を追い抜く状況や駐車車両を避ける状況での危険な動作など、複数の状況のそれぞれにおいて、明らかに対処が必要な衝突シナリオを検出することに成功しています。これによって、開発者は、考えるべき大まかな状況を複数指定して、それぞれの状況での問題点を検出させることができます。
<今後の展望>
本手法では、経路計画プログラムが不十分で衝突事故が起こってしまうシナリオを検出するだけでなく、その事故を避けるための修正案も同時に見つけています。現時点ではこの修正案は、その事故が自車の責任であるどうかを判断するためだけに作成しており、その1つの事故にしか通用しないものです。次のステップとしては、検出した複数の事故全てに対し動作を改善する修正案の検出など、問題の発見だけでなく対処のための知見を自動獲得していくことに取り組んでいます。また本研究の成果は直接的には自動運転のためのものですが、「現実的な程度で厳しいテスト」は、製造業などのさまざまなシステムでも要求されています。今後は他の種類のシステムにも同様なアイデアでの自動テスト生成に取り組んでいきます。
- ※1)
- 本研究で考案したモデルは研究評価用のプロトタイプであり、特に、その品質は最終的な製品の品質には何ら関係ありません。
- ※2)
- IEEE International Conference on Software Testing, Verification and Validation 2020。COREと呼ばれる計算機科学系の国際会議ランキングにてAランク。
<参考図>
-
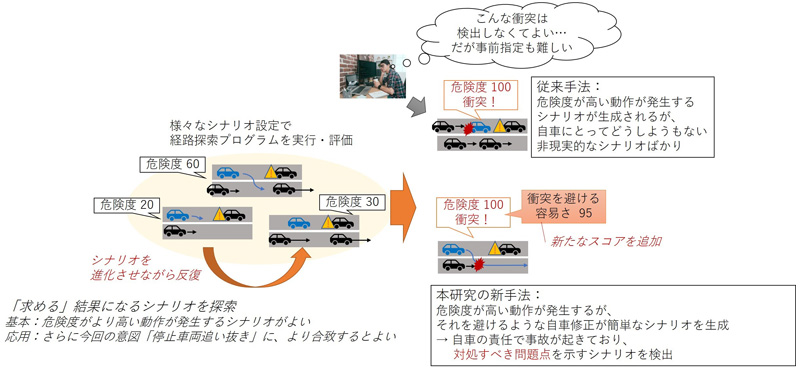
図 開発した「自動運転の経路計画プログラムから危険動作を自動検出する手法」の概念図 自動運転のシナリオを生物に見立て、AIがシナリオの危険度を進化させることにより、衝突事故を起こすシナリオを検出する。また、同じシナリオで衝突を避けるような自車動作の修正もAIが進化させることにより、そのシナリオでは衝突が起こるがそれは自車が避けられるべき衝突であることを確認する。
<論文タイトル>
- “Generating Avoidable Collision Scenarios for Testing Autonomous Driving Systems”
- 著者名:Alessandro Calò、Paolo Arcaini、Shaukat Ali、Florian Hauer、Fuyuki Ishikawa
- 発表日:2020年10月27日(火)口頭発表予定(ICST 2020会期中)
<お問い合わせ先>
-
<JST事業に関すること>
内田 信裕(ウチダ ノブヒロ)
科学技術振興機構 研究プロジェクト推進部
Tel:03-3512-3528
E-mail:eratowww jst.go.jp
jst.go.jp -
<報道担当>
情報・システム研究機構 国立情報学研究所 総務部 企画課 広報チーム
〒101-8430 東京都千代田区一ツ橋2-1-2
Tel:03-4212-2164 Fax:03-4212-2150
E-mail:medianii.ac.jp科学技術振興機構 広報課
〒102-8666 東京都千代田区四番町5番地3
Tel:03-5214-8404 Fax:03-5214-8432
E-mail:jstkohojst.go.jp
(英文)“Generating Avoidable Collision Scenarios for Testing Autonomous Driving Systems”