Progress Report
Intelligent Multi Agents for Exploration and Settlement in Unknown and Unexplored Areas[1] Evolutionary Network Intelligence System
Progress until FY2024
1. Outline of the project
This R&D Iteme is to achieve "Evolutionally Network Intelligence System" as evolutionally algorithms through the technology development to navigate the swarm made by multiple small robots. Each robot will be able to analyze the information obtained by various sensors, and to understand the meaning, then to analyze the discomfort obtained by its behavior. As a result, these will be able to make multiple robots as a swarm decide the strategies to act in collaborating. These information and strategies got from multiple swam will be able to lead the action strategies of the larger swarm. there, the robots and swarms will share the information and the strategies, through the telecommunication network depend on the size of a swarm. To decide the strategies in various level, swarm's telecommunication network itself will be intelligent and construct as "Network Intelligence". Moreover, by the integration both of AI technology and Robotics, Network Intelligence will make a swarm of small robots self-organize and generate the action strategies autonomously.
These schemes will be planned to explore and investigate the unknown space. Each individual of swarm robots explores unknown areas separately, therefore they will be able to explore the hard environment without human resources. Furthermore, it will be integrated as “Evolutionally Network Intelligent System" that smart system will achieve the swarm robots' autonomous cooperative behaviors like transportation of construction materials by robot containers in hard conditions on the moon. Eventually, we will integrate this R&D 1 with R&D 2 and 3, then achieve that the robot swarm will explore autonomously and build the activity bases.

2. Outcome so far
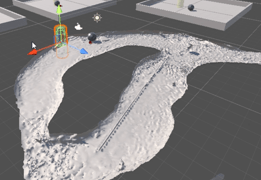
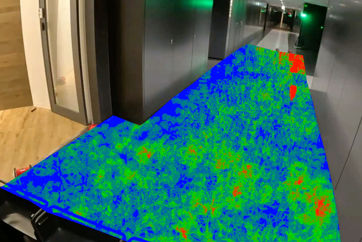
We cannot be recognized the shape of the space in unknown area. Firstly, small robots have to recognize various complex space, and to behave according to recognition. To achieve these behaviors, we have developed the capability to make small robots moved to next area autonomously in jointed two various shaped area. For this, we have defined the area cover rate. Then we made the rule that swarm's exceeding the threshold of the area cover rate in the present area makes swarm moved to next area. Even if they have difficult conditions like a narrow corridor to decide to move to next area, they have been able to make various size of swarm autonomously according to the environment, and to navigate themselves.
Moreover, we have tested that swarm's itself have changed their exploring areas according to presumed area cover rate of unknown area, using actual data detected by the sensors of the small robots.

3. Future plans
Many small robots will be able to make the swarms autonomously, and to be navigated as swarms. These will make the swarms reach the destination by exploring specific areas. For this, we must raise stability and robustness of the intelligence system, these will develop "Evolutional Network Intelligence System" as an operational system of various functions to explore the actual environment.
First, data processing servers will be able to gather the observation data from each small robot. These data will be including the environment information of explored areas, the location information of individual robot and swarm and the behavioral information of them. The integrated information both these data and the optical or radio data to recognize the center position of the swarms will be the observation data related with the location data even in unknown unexplored areas. Even from this vague information, a plan of the behaviors of the individual robot and the swarm will be able to be made, analyzing the spatial progress information and the discomfort information.
Network AI will be able to achieve the autonomous swarm making as self-organizing from individuals, the autonomous swarm navigation and the autonomous swarms' role assignment even in limited conditions of electricity and telecommunication. These functions will be needed to explore lunar lava tube that cannot experiment in the actual environment in advance. therefor we will confirm these function operations with upcoming virtual environment simulator we will develop.
Then, we will integrate these R&D as "Evolutionally Network Intelligence System" that can achieve the autonomous and corporative swarm robot. This intelligent system will be able to complete the swarm exploring robot system that can be used for the actual space exploring mission and the actual earth ground applications.