Progress Report
Adaptable AI-enabled Robots to Create a Vibrant Society[1] R&D of AI for human-robot coevolution
Progress until FY2024
1. Outline of the project
This research theme aims to design AI robot behaviors that encourage humans to act independently, leveraging their remaining and potential abilities without providing excessive assistance. The goal is for users to feel, "With this robot, I can do it myself," thereby initiating proactive behavior. Ultimately, we want them to think, "I can do it myself even without this robot," fostering the vitality to try various new things.
To achieve this, our research focuses on "self-efficacy," which is the subjective perception of one's own capabilities. We are developing an AI robot that improves an individual's self-efficacy and encourages them to attempt diverse actions and tasks.
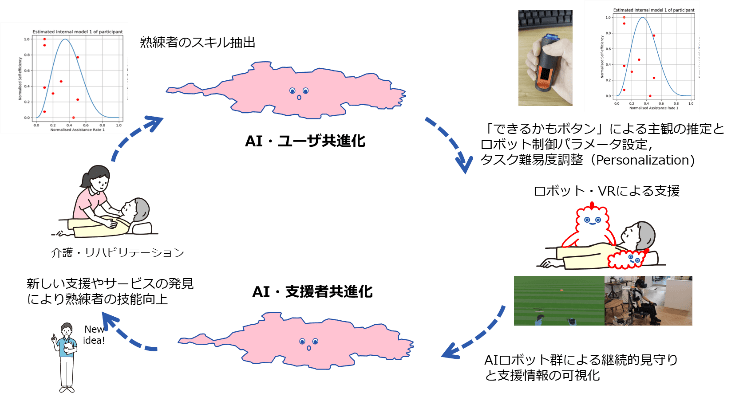
To accelerate our efforts toward practical implementation in nursing care settings, this research and development theme will concentrate on the "daily training and rehabilitation" domain within the overall integrated vision for research and development shown in the figure below.
2. Outcome so far
This research developed a framework to dynamically adjust the control parameters of adaptive AI robots (Nimbus Robots) based on optimal strategies and support parameters from a social implementation AI simulator. This enables personalized robot behavior that precisely matches an individual's current state and goals. As a result, robots are expected to evolve beyond mere tools, becoming entities that meticulously cater to each user's unique needs.
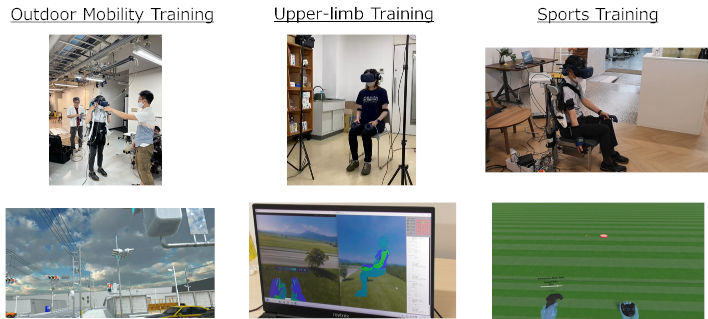
This technology is particularly transformative in daily training and rehabilitation. We've introduced a "can-do button" for direct feedback on a trainee's subjective feelings and motivation. By integrating cutting-edge VR/AR systems with physical support from Nimbus Robots, we've created a system where trainees can actively generate successful experiences (including valuable learning from failures). This comprehensive approach aims to significantly boost trainees' intrinsic motivation and self-efficacy, not just recover or improve physical function. Users can engage in rehabilitation more actively and consistently, enjoying the process like a game, challenging their limits, and experiencing a sense of accomplishment.
Currently, this system's development is most advanced in upper limb support, with its effectiveness clearly demonstrated in multiple validation experiments. However, our research extends beyond this; we've already completed the development of robots and VR systems for gait support and sit-to-stand assistance, steadily expanding its application scope. These systems integrate several advanced technologies for more effective and efficient training and rehabilitation. These include difficulty adjustment functions (for both robot and VR), the aforementioned subjective evaluation feature (can-do button), and detailed feedback based on motion visualization and analysis. This ensures users always receive the optimal level of support tailored to their physical abilities and goals, allowing them to engage in training proactively and maximize their potential.
Furthermore, these developed systems are now undergoing validation in actual care facilities, where we are assessing their practical utility and identifying challenges in real-world settings.
3. Future plans
In the future, we'll further integrate our core technologies for both upper and lower limb support. This means seamlessly linking features like difficulty adjustment, subjective evaluation feedback, and motion visualization/analysis to enhance the system's versatility.
By doing so, we aim to generalize the system's application beyond limited training environments, extending it to a wide range of daily training and rehabilitation tasks. This broad applicability will allow us to address the diverse needs of more users, significantly expanding the possibilities of support from adaptive AI robots.