R&D Project

Goal 3 R&D Projects (FY2022 - FY2023)New World of Inspiration by Co-evolution of Humans, AI Robots, and Biological CyborgsJPMJMS223A
Project manager (PM)MORISHIMA KeisukeOsaka University Graduate school of Engineering
Summary of the project
Living organisms can adapt their behavior to their environment even while they lack access to accurate environmental information. Through the extraction of the "behavior rule" from these living organisms and the design and implementation of the "control rule," we are developing artificial intelligence (AI) technology in this project that can generate the desired self-organization. Additionally, robots and biological cyborgs will be used to test the effectiveness and utility of the system. We aim to build a society where people live more mentally healthy, are not threatened by accidents or natural disasters, and are able to collaborate with robots and biological cyborgs to create new forms of academic field, art, and culture.
Milestone by year 2030
- Achieving Self-Organized Cooperative Work by Robots in Real Fields by Applying Control Rules Found in Biological Cyborgs
- We will design "control rules" that enable self-organized cooperative work even in challenging conditions with a variety of obstacles on soft ground that is prone to collapse and is undulating using a self-organization platform created using biological cyborgs as tools. Moreover, by applying these rules to robots, we will achieve cooperative work by robots in environments that are comparable to real-world work sites.
Milestone by year 2025
- Self-organization by Robot Swarms and Biological Cyborgs in Challenging Conditions by Applying Control Rules Found in Biological Cyborgs
- To help mobile robots perform better in challenging conditions and show that self-organized cooperative transportation by robot swarm is feasible, we will extract "behavior rules" from biological organisms, design, and apply "control rules" to them.
Outline of R&D
R&D theme structure of the project
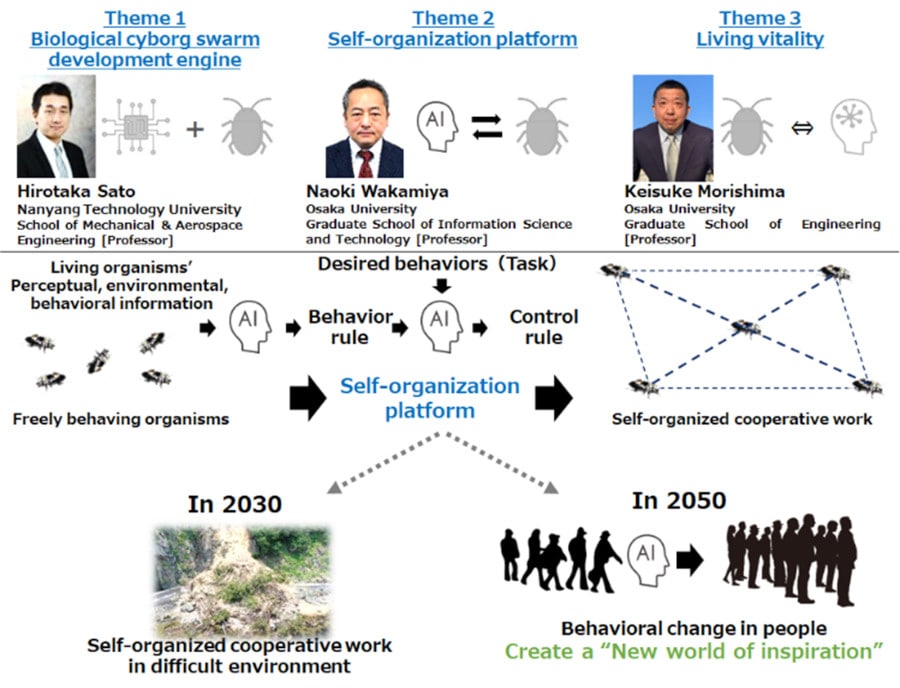
- (1) Biological cyborg swarm development engine
- This engine will enable biological cyborgs, organisms equipped with ultra-compact sensors, communication devices, and behavior control units to act on its perception and behavior by extracting information about the organism's own perception and behavior as well as information about the surrounding environment.
- (2) Self-organization platform
- We will design control rules that enable self-organization while utilizing the original behaviors of living organisms using biological cyborgs as tools. We will also develop AI technologies that help robots to change their behaviors through applying these rules.
- (3) Living vitality
- In order to design control rules that take into account the pleasure and discomfort of organisms, we will develop a method to quantitatively measure the living vitality based on their perceptual and behavioral information.
Leader's institution
Osaka University
R&D institutions
Nanyang Technological University (NTU)
PDF Download
- Summary of the project (196KB)
- Outline of R&D (193KB)