
プロジェクト概要
研究概要
ロボットの研究分野の広がりとともに、ロボット研究は、日常的な場面で働くロボットに焦点を移しつつあります。日常的な場面において、人間が最も容易にコミュニケーションを取ることができるのは人間そのものです。そのため、多様な感覚や言語、身体動作を用いて、複数の人間と関わることができるロボットの研究開発が重要になります。
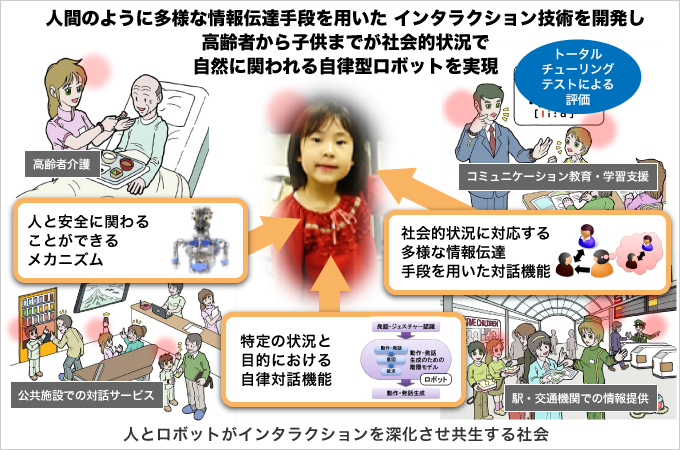
本研究領域では、身振り手振り、表情、視線、触れ合いなど、人間のように多様な情報伝達手段を用いて対話できる、社会性を持つ自律型ロボットの実現を目標に、共生ヒューマンロボットインタラクション(人間とロボットの相互作用)の研究開発に取り組みます。特に、人と安全に関わることができるロボットの皮膚や内部メカニズム、頑健で柔軟な音声認識技術の開発と、欲求、意図、行動・発話の階層モデルの構築を行います。これらにより、特定の状況と目的において自律的に対話できる機能や、複数の情報伝達手段を用いて社会的状況で複数の人間と対話できる機能を開発し、実社会において人間と親和的に関わり、人間と共生するための自律型ロボットの実現を目指します。
開発したロボットの人間らしさは、遠隔操作されるロボットとの比較や、人間との直接的な比較によって評価し、特定の状況、目的、対象者において、ロボットが人と同レベルのものに感じられることを確認します(トータルチューリングテスト)。さらに、技術の実用化に向けて、ロボットを用いた高齢者や発達障害者の生活支援に取り組みます。具体的には、高齢者介護において物理的支援と同様に重要な対話支援や、発達障害者の療育を目指すとともに、健常者へのコミュニケーション教育・学習支援や公共施設での情報提供や対話サービスへの展開を図ります。
一方、このようなロボットは、人間を理解するテストベッドにもなります。現実的な場面でのロボットと人間との関わりを通して、自己・他者認識、意識、心といった、認知科学や脳科学における重要課題について、理解を深めることが期待されます。
自律型ロボット研究グループ(大阪大学)

人と安全に関わるメカニズム、対人場面における自律対話機能、社会的場面における自律対話機能の実現を目標とし、研究用に用いるジェミノイド、テレノイド、シンキーなどのロボットのハードウェア及びソフトウェア開発に取り組むと共に、音声対話研究グループと連携しながら、対人場面および社会的場面におけるトータルチューリングテストに取り組みます。
音声対話研究グループ(京都大学)

頑健な音声認識システム、意図・欲求・発話の階層構造を持つ柔軟な対話システムの実現を目標とし、自然な対話を実現する音声認識技術、対話生成技術の研究開発に取り組みます。また、自律型ロボット研究グループと連携して、特に、対人場面におけるトータルチューリングテストに取り組みます。
実証研究グループ(ATR)

高齢者に対する対話サービス、発達障がい者に対する対話サービス、健常者への教育・学習支援及び公共施設での情報提供や対話サービスの実現を目標とし、高齢者や自閉症児のケアに用いるジェミノイド、テレノイド、シンキーなどのロボットのハードウェア及びソフトウェア開発と、日本及びデンマークにおいて関連施設と連携しながら実証研究に取り組みます。




