









ダイポール場を利用した平面上における非把持物体搬送アルゴリズム
五十嵐 健夫、神山 洋一、稲見 昌彦

概 要
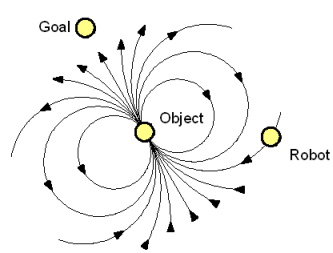
平面上における物体搬送アルゴリズムを提案する。ロボットと対象物体の絶対位置を入力として受け取り、 それをもとに対象物体の周囲にダイポール場を計算し、そのベクトル場にしたがってロボットを動かすことで搬送を実現する。 本アルゴリズムは、衝突回避、エラー修復、複数ロボット協調といった、 非把持物体搬送にかかわるさまざまな現象を効率よく扱うことができる。 また、本アルゴリズムを大きさのロボットや物体に適用し、実際に運搬を行えることを示す。 非把持物体搬送自体はすでにいくつもの試みがなされているが、本手法は、 モード切替およびまた物体・ロボットの大きさに依存したパラメータをなくすことによって、 実装の手間を大幅に削減しているところに主な貢献がある。
発表文献
Takeo Igarashi, Youichi Kamiyama, Masahiko Inami,
"A Dipole Field for Object Delivery by Pushing on a Flat Surface",
Proceedings of the The 2010 IEEE International Conference on Robotics and Automation (ICRA2010),
pp. 5114-5119.
![]() YouTube
YouTube
国内発表
五十嵐健夫、神山洋一、稲見昌彦、
「ダイポール場を利用した平面上で物体を押して運ぶアルゴリズム」、
ロボティクス・メカトロニクス講演会2012 (ROBOMEC 2012)、
ポスター、2012年5月27-29日、浜松。
ソースコード
特 許
-
発明名称 搬送システム、ロボットの制御方法
特許第4952959号 2012/03/23、 特願2009-262645 2009/11/18、 特開2011-108003 2011/06/02。