









拡張現実感を用いた家庭用ロボットへのシーケンシャルなタスクの教示
Richard Fung, 橋本 直, 稲見 昌彦, 五十嵐 健夫
概 要
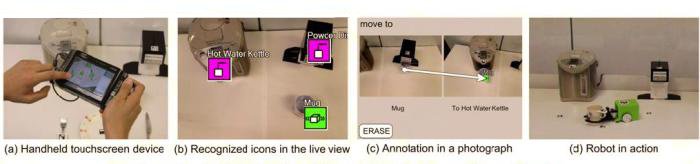
ハンドヘルドのAR(Augmented Reality:拡張現実感)デバイスを用いて,家庭用ロボットに対するシーケンシャルなタスクの教示を行うシステムを提案する.シーケンシャルなタスクは,小さなタスクの集まりと見ることができる.例えば,「コーヒーを淹れる」というタスクは,「カップにインスタントコーヒーの粉を入れる」「ポットの下にカップを置く」「お湯を注ぐ」など,いくつかのステップに分けることができる.本手法では,それぞれのステップにおいて写真を撮り,必要な情報をアノテーションとして付加することによって,作業手順の教示を行う.情報が付加された写真は,後日ユーザがタスクを選択する際のリファレンスとなる.本論文では,提案手法の概要と実装したプロトタイプ,およびその実験結果について報告する.
発表文献
Richard Fung, Sunao Hashimoto, Masahiko Inami, Takeo Igarashi,
"An Augmented Reality System for Teaching Sequential Tasks to a Household Robot",
20th IEEE International Symposium on Robot and Human Interactive Communication (Ro-Man 2011) , July 31 - August 3, Atlanta GA.
![]()
ビデオ
リンク
特 許
-
発明名称 タスク指示システム
特許第5071873号 2012/08/31、 特願2010-159005 2010/07/13、 特開2012-022475 2012/02/02。