ポイント
- 産業用ロボットアームをベースとした双腕の手術支援ロボット「スマートアーム」を開発しました。
- スマートアームには、術具同士や術具と生体との衝突をロボットが自動で回避する制御など、大学・企業・病院との共同研究により開発したさまざまな最先端のロボット技術が統合されています。
- スマートアームは手術支援ロボットとして世界最高水準の性能で、経鼻内視鏡による脳外科手術など微細な領域の手術を主な対象としており、高度で困難な手術へのロボット手術適応の可能性が広がります。
東京大学 大学院工学系研究科 光石 衛 教授らの研究グループは、大学・企業・病院との共同研究により、脳神経外科などにおける微細手術への適用を可能とする低侵襲手術支援ロボット「スマートアーム」を開発しました。
近年医療現場に導入されている低侵襲手術支援ロボットは、腹部を主な対象としていますが、さらにさまざまな手術への普及が期待されています。しかしながら体内の狭所・深部において非常に繊細で高度な手術を行うには、個別技術の小型化や高性能化に加えて、手術ロボットシステムとしていかに要素技術を統合するかが大きな課題でした。
本研究グループは、大学・企業・病院との共同研究により開発した要素技術を統合し、産業用ロボットアームをベースとした双腕の手術支援ロボット「スマートアーム」を開発しました。スマートアームの研究開発は、バイオニックヒューマノイド注1)の脳神経外科手術用モデル「バイオニック・ブレイン」を活用することで、脳神経外科医からのフィードバックを受けながら医工連携研究として実施しました。このバイオニック・ブレインを用いることで、経鼻内視鏡手術注2)における硬膜縫合を実現できる性能も確認しました。これは手術ロボットとして世界最高水準の性能です。この研究成果により、高度で困難な手術へのロボット手術適用の可能性が大きく広がります。
本研究成果は、平成31年1月11日(金)に東京大学 伊藤国際学術研究センターで開催される公開シンポジウムにおいて(https://www.jst.go.jp/impact/sympo/bionic-humanoids/index.html)、研究報告を行うとともに実機や関連技術の展示を行います。
本成果は、以下のプログラム・研究開発課題によって得られました。
内閣府 革新的研究開発推進プログラム(ImPACT)

光石 衛 教授
| プログラム・マネージャー |
原田 香奈子 |
| 研究開発プログラム |
「バイオニックヒューマノイドが拓く新産業革命」 |
| 研究開発課題 |
「医療スマートアーム システム統合」 |
| 研究開発責任者 |
光石 衛 |
| 研究期間 |
平成27年度~平成30年度 |
本研究開発課題では、要素技術を統合して1つのロボットシステム「スマートアーム」として開発します。統合したロボットシステムの制御手法の開発に取り組んでいます。
<原田 香奈子 プログラム・マネージャーのコメント>
本プログラムでは、センサーを内蔵した精巧な人体モデル「バイオニックヒューマノイド」を使って感覚的な表現を定量的に理解し、試行錯誤をなくすことで、技術シーズを早く社会に届けることを提案しています。今回の成果は、脳神経外科手術用のバイオニックヒューマノイドを活用することで、微細手術の課題を定量的に理解し、効率的な医工連携研究を実施することで実現しました。本プログラムの提案するプロセス革命により、最先端のロボット技術シーズを短期間に世界最高水準の手術ロボットとして統合することに成功しており、本プログラムの構想を展開することでさまざまな医工連携研究を加速できると考えます。
<研究の背景>
本研究は、ImPACTプログラム「バイオニックヒューマノイドが拓く新産業革命」の一環として実施されました。本プログラムでは、高感度センサーを内蔵した精巧な人体モデル「バイオニックヒューマノイド」を開発し、ヒトや実験動物の代替とすることで革新的技術シーズの研究開発や社会実装を加速することを目指しています。
本プログラムの「プロジェクト2:スマートアーム」は、バイオニックヒューマノイドを活用することで革新的技術の研究開発を加速した例を示すことを目的としています。革新的ロボット技術シーズを早期に手術支援ロボット「スマートアーム」として統合するため、大学・企業・病院による医工連携・産学連携研究として実施しました。
近年医療現場に導入されている手術支援ロボットは、腹部を主な対象としていますが、さらにさまざまな手術への普及が期待されています。しかしながら体内の狭所・深部において非常に繊細で高度な手術を行うには、個別技術の小型化や高性能化に加えて、手術ロボットシステムとしていかに統合するかが大きな課題でした。
本プロジェクトでは、困難な手術の中でも脳神経外科手術における経鼻内視鏡手術を主な対象として設定しました。この手術においては、鼻から術具を挿入して狭小空間で術具を精密に操作する必要がありますが、このような医療現場での課題を工学系研究者が理解することは困難でした。また、人間と同じ鼻を持つ動物がないことから、動物実験をベースにロボットの研究開発や評価を行うことはできず、研究開発に着手することすら難しい状況でした。
<開発内容>
本研究では、当該プログラムが提案するセンサー付き超精巧人体モデル「バイオニックヒューマノイド」を活用することで、対象とする手術の課題を定量的に把握し、また、医師によるロボット評価を医工連携体制で推進することで、研究開発期間を大幅に短縮し、プロトタイプの早期開発を実現することができました。
近年急速に普及している手術支援ロボットの多くは、腹部など比較的広い作業空間を確保できる部位を対象としており、ロボット術具は直径8ミリメートルのものが主に使用されます。また、手術支援ロボットは医師の手の動きを忠実に再現するため、特に視野外でのロボットと生体との接触が危険であるという問題がありました。
これに対し本プログラムでは狭所・深部の微細手術を対象とするため、より細径のロボット術具の開発や微小なセンサーの搭載、ロボット術具同士やロボット術具と生体との衝突を自動で回避する制御、さらにはロボットを操作する医師の安全を配慮した自動停止機能など、多くの要素技術を新たに開発する必要がありました。また、これらの最先端技術を1つのロボットシステムとして統合することがとりわけ大きな課題でした。
スマートアームは産業用ロボットアームをベースとした双腕の手術支援ロボットです。スマートアームには九州大学・(株)高山医療機械製作所・東京大学などが開発した、新たな駆動機構により先端が屈曲する直径3.5ミリメートルのロボット術具が搭載されており、そのロボット術具には東北大学・九州大学・東京大学が開発した微小な力センサーも搭載しています。ロボットアームは(株)デンソーが開発したセンサー付きカバーによって覆われており、人との衝突を検知して自動で停止することができます。スマートアームは名古屋大学が開発したユーザーインターフェースにより、医師が直接ロボットに触って操作します。一般的な低侵襲手術支援ロボットのように、離れた場所から操作できるようなユーザーインターフェースも東京大学が開発しており、術具同士や術具と生体との衝突を自動で回避しながらロボットを操作できます。このように、世界最高水準のロボット技術を集約することで、医師や患者にとって安心安全な手術支援ロボットを実現しています。
スマートアームは、本プログラムの「プロジェクト1:バイオニックヒューマノイド」において名古屋大学 新井 史人 教授らが中心となって開発したバイオニックヒューマノイドの脳神経外科手術用モデル「バイオニック・ブレインBionic Brain(BB)」を活用し、東京大学および日本医科大学の脳神経外科医からのフィードバックを受けながら開発することで、3年という短期間で構想からシステム統合まで行うことに成功しました。このバイオニック・ブレインを用いることで、用手的に行う場合には極めて困難である経鼻内視鏡手術における硬膜縫合を実現できる性能も確認しています。これは手術ロボットとして世界最高水準の性能です。開発された要素技術は、それぞれ単体としても極めて高度であり、医療以外への展開も積極的に行っていく予定です。
<社会的意義>
今回の手術ロボット技術の確立によって、経鼻内視鏡手術のような高度で困難な手術へのロボット手術適用の可能性が大きく広がります。経鼻内視鏡手術は、患者にとっては開頭手術と比較して格段に回復の早い手術であり、このような低侵襲手術を広く普及することが期待されます。また、スマートアームは、ロボット術具を交換することにより、これまでロボット手術の対象とならなかった体内の狭所・深部における微細手術にも適用可能です。スマートアームを基盤として、手術支援ロボット研究開発を世界的にリードしていきます。
また本研究では、バイオニックヒューマノイドを活用することにより、スマートアームのプロトタイプを早期に開発することができました。このことは、試行錯誤をなくすことで技術シーズを早く社会に届けるというプロセス革命の可能性が大きく開けたことを意味します。
<参考図>
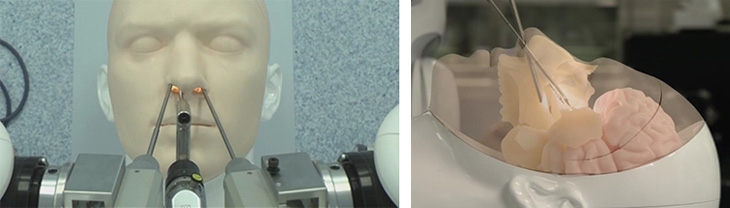
図1 経鼻内視鏡手術を想定したスマートアームの操作(バイオニックヒューマノイドを用いた評価と透視イメージ)

図2 内視鏡下で硬膜モデルに針を刺す様子(ロボット術具は直径3.5mmで先端が屈曲する)
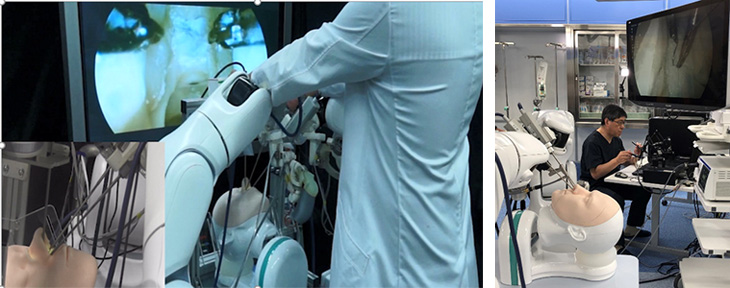
図3 スマートアームを操作する様子
<用語解説>
- 注1)バイオニックヒューマノイド
- 内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)の「バイオニックヒューマノイドが拓く新産業革命」(プログラム・マネージャー:原田 香奈子)(https://www.jst.go.jp/impact/program/15.html)で開発中のもので、ヒトや実験動物の代わりとなるセンサー付きの精巧な人体モデルのこと。
- 注2)経鼻内視鏡手術
- 鼻孔から内視鏡と術具を挿入することで、開頭手術ではアプローチが難しい脳の下部にある下垂体や頭蓋底にアプローチする術式。開頭手術と比較して、傷が残らず、また、脳への侵襲が低いため、術後の早期回復が可能。
<お問い合わせ先>
<スマートアームの研究に関すること>
光石 衛(ミツイシ マモル)
東京大学 大学院工学系研究科 教授
Tel:03-5841-6355(直通)
E-mail:
長谷川 泰久(ハセガワ ヤスヒサ)
名古屋大学 大学院工学研究科 教授
E-mail:
芳賀 洋一(ハガ ヨウイチ)
東北大学 大学院医工学研究科(兼)大学院工学研究科 教授
E-mail:
荒田 純平(アラタ ジュンペイ)
九州大学 大学院工学研究院 機械工学部門 准教授
E-mail:
植山 剛(ウエヤマ ツヨシ)
(株)デンソー 新事業統括部 メディカル事業室 担当次長
高山 隆志(タカヤマ リュウシ)
(株)高山医療機械製作所 社長
E-mail:
<バイオニックヒューマノイドの研究に関すること>
新井 史人(アライ フミヒト)
名古屋大学 大学院工学研究科 教授
E-mail:
<医療応用の研究に関すること>
齊藤 延人(サイトウ ノブヒト)
東京大学 大学院医学系研究科 脳神経医学専攻 脳神経外科学 教授
E-mail:
森田 明夫(モリタ アキオ)
日本医科大学 大学院医学研究科 脳神経外科学分野 教授
E-mail:
<ImPACT事業に関すること>
内閣府 革新的研究開発推進プログラム担当室
Tel:03-6257-1339
<ImPACTプログラム内容およびPMに関すること>
科学技術振興機構 革新的研究開発推進室
Tel:03-6380-9012 Fax:03-6380-8263
E-mail:
<報道担当>
東京大学 工学部・大学院工学系研究科 広報室
Tel:03-5841-1790 Fax:03-5841-0529
E-mail:
東京大学 医学部附属病院 パブリック・リレーションセンター
Tel:03-5800-9188 Fax:03-5800-9193
E-mail:
名古屋大学 総務部 総務課 広報室
Tel:052-789-2699 Fax:052-789-2019
E-mail:
東北大学 大学院医工学研究科 事務室
Tel:022-795-5826 Fax:022-795-5018
E-mail:
九州大学 広報室
Tel:092-802-2130 Fax:092-802-2139
E-mail:
日本医科大学 総務部 広報課
Tel:03-5814-6242
E-mail:
科学技術振興機構 広報課
Tel:03-5214-8404 Fax:03-5214-8432
E-mail: