ポイント
- 灼熱のとがった複雑形状の物体でもつかめる柔軟堅牢ロボットハンドを開発。
- 数珠状の金属指を用い、「耐火性・耐切創性」と「柔軟性」を両立。
- どんな形でも容易につかめるため、火災など灼熱災害現場で熱源へアクセスするための瓦礫除去はもとより、工場での高温作業・多品種対応にも有効。
内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、東北大学の多田隈 建二郎 准教授、田所 諭 教授、昆陽 雅司 准教授、藤本 敏彰 博士前期課程学生、藤田 政宏 博士後期課程学生らのグループは、炎の中の高温でとがった物体、複雑形状物や脆弱物体など、多様な物体をつかめるロボットハンドを新規に開発しました。
ロボットハンドの全体構造を、数珠のような指を放射状に配置することで、袋が破けるということ自体が発生しない構造を確立しました。これにより、高い耐切創性、また、数珠のピースを金属素材にすることで著しく高い耐火性と柔軟性を両立し、つかむ対象はもとよりロボットハンド自身を傷つけることなく作業を行うことができます。
これまで開発された袋型のロボットハンドは、さまざまな形状の物体をつかむことができる一方、ゴムや布の耐熱性が低く、灼熱の環境下では作業が困難といった問題がありました。この成果により、つかめる物体の範囲が飛躍的に拡大されるため、火災など灼熱災害現場で熱源へアクセスするための瓦礫除去はもとより、工場での高温作業・生産性向上にも大きく寄与すると期待されます。
本成果は、以下の事業・研究プロジェクトによって得られました。
内閣府 革新的研究開発推進プログラム(ImPACT)
https://www.jst.go.jp/impact/
| プログラム・マネージャー |
田所 諭 |
| 研究開発プログラム |
タフ・ロボティクス・チャレンジ |
| 研究開発課題 |
極限環境での探査活動能を拡張させる革新的ロボット機構の研究開発 |
| 研究開発責任者 |
多田隈 建二郎 |
| 研究期間 |
平成26年度〜平成30年度 |
この研究開発課題では、極限環境下で探査活動能力を拡張させるロボットのメカニズムの実現に取り組んでいます。
<田所 諭 ImPACTプログラム・マネージャーのコメント>
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創り出し、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的として、プロジェクト研究開発を推進しています。
高温物体のハンドリングは工場や火災現場などにおいて大きな課題です。柔軟ロボットハンドは把持できる物体の範囲が広く、精密な位置決めや制御が必要ないという利点を有していますが、これまで高温物体を把持することはできませんでした。本成果は、1次元ジャミング機構によって柔硬を切り替えられるケーブルを新たに発明し、それを複数本組み合わせることによって新しい方式の柔軟ロボットハンドを構成したものです。さらに、ケーブルを耐火材料とすることにより、さまざまな高温物体を把持できるようにすることができました。火災に限らず、工場などにおいて、高温物体の操作を必要とするさまざまな作業への適用が期待されます。
<背景>
災害からの復旧を支援する目的として、作業者の安全を確保しつつ遠隔操作で作業できるロボットが求められています。中でも、ロボットハンドはバルブの開閉や瓦礫の把持・運搬などの直接環境と接触する作業で活躍し、その機能や性能によって作業が可能か否かを決める重要な要素となります。
従来の袋型のロボットハンドはとがった物体をつかむ際に袋が破れる問題がありました(国際レスキューシステム研究機構、科学技術振興機構(JST)プレスリリース、“刃物のようにとがった物体でもつかめる柔軟ロボットハンドを開発~瓦礫でも壊れない高い耐切創性・耐久性を実現~”、平成30年6月14日。https://www.jst.go.jp/pr/announce/20180614/index.html)。そのため、災害時の現場で、破損バルブの開閉や瓦礫内のガラスの破片、鉄筋の露出した鉄筋コンクリートなどをつかむことができず、物体に合わせてロボットハンドを別の物に付け替える必要がありました。また、プラント爆発後などの火災現場などでは灼熱の瓦礫をつかむことは極めて困難でした。
本研究グループでは、形や大きさがまちまちな物でもつかむことができる数珠状の構造を有する線状機構(1次元ジャミング機構:硬さの変わる紐状構造体)を複数有するロボットハンドを開発してきました。内部のワイヤーを引くことで、数珠玉同士が接触力を高めて指全体が硬化します。そのため、従来の袋型と内部粉体の柔剛切替に対して、「『破ける』という現象自体がなく」、布やゴム素材を使用しない金属性部品で構成できるため、灼熱の環境下で、高温でなおかつ複雑な形状や脆弱な物体の損傷を抑えた状態でつかむことが可能になります。以上のように、従来の袋型構造に対して、数珠状の金属指を複数用いたロボットハンド構造のアイディアを考案し、柔軟性を保ちながら優れた耐火性・耐切創性を実現しました。
この性能は、プラント爆発後の火災現場だけではなく、ゴム素材を用いることが困難な原子力発電所内での作業、工場の生産現場でも活躍が期待されています。また、部品に応じてロボットハンドを交換する必要がなく、そのままでさまざまな部品に対応できるため、多品種少量生産で必要な、多くの種類の複雑形状の部品をつかむことや組み立て、搬送作業への適用も期待されています。
<研究成果の概要>
ロボットハンドの構造を図2に示します。ロボットハンドは、数珠状の指を放射状に配置した対称構造となっています。この構造により、物体を包み込むようにしてつかみます。
従来の粉体を用いたジャミング転移現象を用いた柔剛の切り替え機能は、袋構造を有しており、袋が破けると十分に働かなくなるため、従来のロボットハンドではとがった物体はつかめませんでした。当研究チームでは、この問題を解決するために、次に示すように、従来とは全く異なる構造のロボットハンドの考案と具現化を目指しました。
-
1.ロボットハンドの全体構成:数珠状の指構造の放射状配置
耐切創性を究極にまで高めるために、実機実験を通して各種素材・構造を時間をかけて検討した結果、「『破ける』という現象自体が起こりえない」数珠状の構造を持った指を放射状に配置した全体構造にするという考えに行き着きました。この数珠状の指は、内部のワイヤーを引くことにより、それぞれのピースが接触力を高めて硬くなるという性質を持っています。
従来のジャミング転移現象を用いる袋型の構造では、内部に空気を含む構造であったため、とがった物体と接触すると袋が破けたり、灼熱環境下では内部の空気が膨張したり、袋の素材であるゴムや布自体が高温下では機能しなかったりという問題がありました。この数珠状の指を持つロボットハンドでは、数珠のピースに耐火性の高い金属素材を用いることによって、耐久性のみならず、著しく高い耐火性をも実現することが可能となりました。
-
2.技術的ポイント:線状の柔剛切り替え機構におけるユニット形状の最適化
数珠状の1次元ジャミング機構における1つのユニットの円弧部と表面摩擦具合が今回技術的にも非常に困難だったポイントです。図6(a)に示す球状では経路形状を維持することが困難でしたが、1ピースの構造を(b)に示すお椀形とすることにより、経路形状を維持した状態で剛性を高め硬化することが可能となりました。この1次元ジャミング機構に、1方向にのみ湾曲するように数珠構造をかえ、ロボットハンドへと応用したものが図7に示す機体となります。
これにより、センサもアクチュエータもロボットハンド内部には搭載することなく、物体の形状へなじみ適用する機能を有しながらも、するどくとがったものに接触したり、刃物で切りつけたりしても袋が破損しない、従来にない極めて高い耐火性・耐切創性を持つロボットハンドが実現できました(図3)。
-
3.各種把持実験
以上の数珠状の指を有するロボットハンドにより、図8に示すように、とがった物体をつかむ実験を行いました。従来では柔軟なゴム膜がバルブのとがった部分に接触し破損していましたが、今回開発した数珠状の1次元ジャミング機構の指を用いたロボットハンドの方式では、破損なく開閉作業が行えることを確認しました。
また、図9に示すように、有刺鉄線が絡みついた状態で歪な形状をした鉄棒を炎の中にロボットハンドを挿入して約2kgの瓦礫をつかむ実験にも成功しました。図10、11に灼熱環境下での作業の全体像と、このロボットハンド部の動作の拡大図をそれぞれ示します。
以上のように、このロボットハンドを用いれば、灼熱の環境下で、高温の物体や、破損したバルブ、不定形な割れたガラス類や、建築用で飛び出た釘類、鉄条網などの、従来不可能であった高温・とがった・不定形・脆弱軟弱な物体をつかむことが可能となります。
さらに、放水銃をロボットハンドの中央に設けることで、瓦礫や扉・蓋をこじ開け、先の火元へ直接消火剤をかけて迅速かつ確実に消火を促す機器への展開も考えられます。
また、このロボットハンドは軽量なため災害対応用ヘビ型ロボットや脚型ロボットをはじめとする各種プラットフォームに搭載可能です。
このような耐切創性に加えて、耐火性の向上は、炎が存在する火災を含めた災害現場はもとより、工場における生産現場における柔軟ロボットハンドの実用性を飛躍的に高めるものであり、今後の広い活用が見込まれます。
本成果は、11月2日に福島ロボットテストフィールドで開かれる「ImPACTタフ・ロボティクス・チャレンジフィールド評価会」において、実機によるデモンストレーションが行われます。
<今後の展開>
今後は、繰り返し使用を考慮した耐久性・耐火性に加え、形状なじみのさらなる向上など、実用化を目指した研究を進めていきます。そして、5年以内に、実際の瓦礫に近い環境下で実用性の確認を行う予定です。さらに、廃品回収用の産業ロボットメーカなどと協力して、事業化を進める予定です。
<参考図>
図1 耐火・耐切創性数珠状ロボットハンドの基本コンセプト
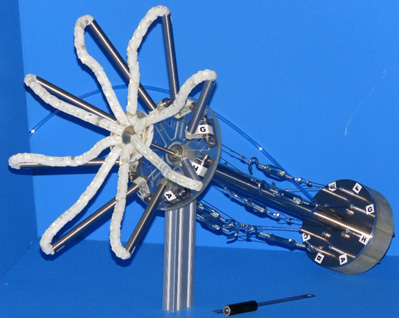
図2 開発した数珠状ロボットハンド機構の外観
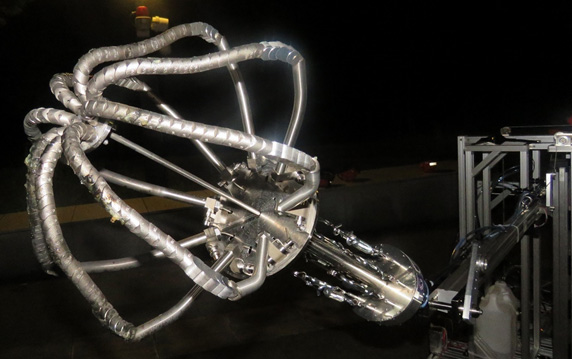
図3 耐火性を実現した数珠状ロボットハンド機構の外観
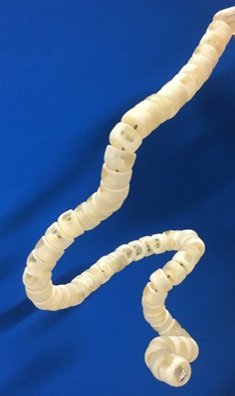
図5 柔剛切り替え可能な線状メカニズム(1次元ジャミング機構)の外観
(a)単一ユニット対称形状
(b)単一ユニットお椀形状
図6 1次元ジャミング機構の基本原理
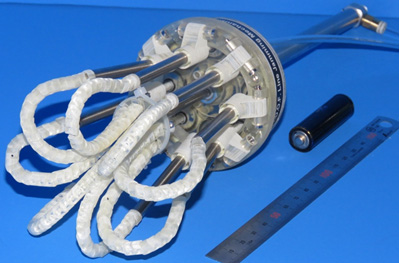
図7 1次元ジャミング機構を指としたロボットハンドの外観(簡易型汎用版)

図8 ロボットハンドでつかむことが可能な日常品の例
(刃物を刃部からも把持可能)

図9 灼熱環境下における有刺鉄線の絡まった瓦礫の把持
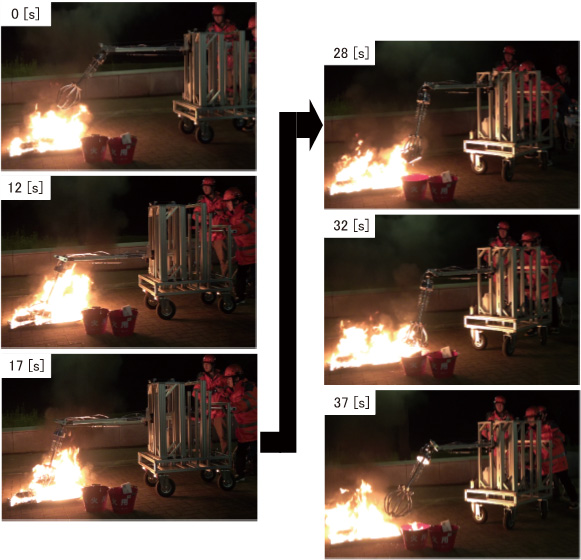
図10 耐火性グリッピング実験全体像
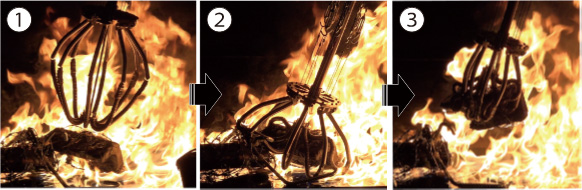
図11 耐火性グリッピング実験のロボットハンド部拡大図
<お問い合わせ先>
<研究に関すること>
多田隈 建二郎(タダクマ ケンジロウ)
東北大学 大学院情報科学研究科 応用情報科学専攻 准教授
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel:022-795-7025
E-mail:
田所 諭(タドコロ サトシ)
東北大学 大学院情報科学研究科 教授
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel:022-795-7022
E-mail:
<ImPACT事業に関すること>
内閣府 革新的研究開発推進プログラム担当室
〒100-8914 東京都千代田区永田町1-6-1
Tel:03-6257-1339
<ImPACTプログラム内容およびPMに関すること>
科学技術振興機構 革新的研究開発推進室
〒102-0076 東京都千代田区五番町7 K’s五番町
Tel:03-6380-9012 Fax:03-6380-8263
E-mail:
<報道担当>
東北大学 大学院情報科学研究科 広報室
〒980-8579 宮城県仙台市青葉区荒巻字青葉6-3-9
Tel:022-795-4529 Fax:022-795-5815
E-mail:
科学技術振興機構 広報課
〒102-8666 東京都千代田区四番町5番地3
Tel:03-5214-8404 Fax:03-5214-8432
E-mail: