ポイント
- 新たに開発したサイバースーツで計測する心電と運動の情報により、救助犬の活動中の活性度(快/不快の情動)を、その信頼度とともに推定することに成功しました(世界初)。
- タブレット端末などに表示することにより、災害救助活動中の犬の情動をリアルタイムに遠隔モニタリングすることが可能です。
- これまでは飼い主の感覚でしか判断出来なかった犬の快/不快の情動を、他者が客観的に判断できることで、情動が快の時に集中的に捜索を実施し、不快の時は休憩を取らせるなど、救助犬を効果的に運用することができます。
内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、東北大学の大野 和則(オオノ カズノリ) 准教授、濱田 龍之介(ハマダ リュウノスケ) 助教、麻布大学の菊水 健史(キクスイ タケフミ) 教授、永澤 美保(ナガサワ ミホ) 講師、奈良先端科学技術大学院大学の池田 和司(イケダ カズシ) 教授、久保 孝富(クボ タカトミ) 特任准教授、熊本大学の山川 俊貴(ヤマカワ トシタカ) 助教、京都女子大学の丸野 由希(マルノ ユウキ) 講師らのグループは、「犬の情動をリアルタイム推定するサイバースーツ」(図)の開発に成功しました。従来は困難であった、犬の活動中の心電計測が可能になると同時に、心電から得られる心拍変動指標(HRV注1))と慣性センサ注2)の情報を融合することで、運動中の快/不快の情動とそれが信頼できるかを判定し、タブレット端末などにリアルタイムに表示することが可能になりました。災害救助犬に装着することで、犬を適切なタイミングで休ませたり、集中できる状態で仕事をさせたりすることで、災害現場での被災者捜索を効率化し、信頼性を向上させると期待されます。
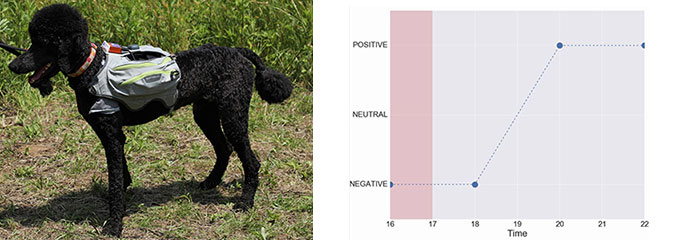
図 犬の情動をリアルタイムに推定するサイバースーツと快/不快情動の判定
本成果は、以下の事業・研究プロジェクトによって得られました。
内閣府 革新的研究開発推進プログラム(ImPACT)
URL:https://www.jst.go.jp/impact/
| プログラム・マネージャー |
田所 諭 |
| 研究開発プログラム |
タフ・ロボティクス・チャレンジ |
| 研究開発課題1 |
サイバー救助犬の研究開発
(研究開発責任者:大野 和則、研究期間:平成26年度〜平成30年度) |
| 研究開発課題2 |
災害救助犬や探知犬の作業と心身の可視化システム開発
(研究開発責任者:菊水 健史、研究期間:平成27年度〜平成30年度) |
これらの研究開発課題では、ロボット技術を利用して災害救助犬の探査能力を支援・強化するサイバースーツの開発に取り組んでいます。
<田所 諭 ImPACTプログラム・マネージャーのコメント>
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
災害救助犬は欧米を中心として山岳救助や都市型災害捜索救助に広く使用されていますが、動物特有の課題を有しています。特に、活性度が低いと著しく捜索能力が下がるため、情動をモニタリングしながら適切なコントロールを行うことが肝要です。本研究成果は、心電や加速度情報を使用することで、救助犬の活性度を推定することを可能にしたものであり、救助犬に装着するサイバースーツに搭載することで、飛躍的に救助犬の運用を容易にすることができる、と期待されます。今後、多数の犬で推定試験を繰り返し、環境条件などによらずその確度を高めるとともに、実用化を進めていくことが重要と考えています。なお、この技術は来る11月10日に東北大学で開催されるImPACTタフ・ロボティクス・チャレンジ公開フィールド評価会でデモンストレーションを行う予定です。
<研究の背景と経緯>
東広島土砂災害、熊本土砂災害、阪神淡路大震災に代表される大規模災害では、土砂に埋もれた家屋や、倒壊した家屋の中に取り残された被災者の発見が大きな課題です。東北大学 大野准教授、濱田助教を中心とするグループでは、災害救助犬の被災者探査活動を支援・能力拡張を目的として、カメラやセンサなどを用いた計測・認識技術により救助犬の活動能力を飛躍的に向上させるサイバースーツの開発に取り組んできました。これまでに、救助犬が被災者を発見して吠えてその位置を知らせる際に、被災者の周囲の状況や、地図上の被災者位置の情報も一緒に、異なる場所の複数の人がリアルタイムに共有することを可能にするサイバースーツの開発を行いました参考文献1)。また、開発したサイバースーツを、日本救助犬協会や、消防隊の合同訓練などで、性能を評価しました。ImPACTタフ・ロボティクス・チャレンジでは、サイバースーツに様々な計測・認識方法を統合し、犬の探査活動中の遺留品発見や、行動や探査軌跡の推定に係る研究開発に取り組んできました。
犬の活性度が下がると、被災者の探索能力が下がるため、犬の活性度を判断する方法の開発が必要です。しかし、これまでのサイバースーツは、活動中の犬の活性度を計測し可視化することができませんでした。犬の探査の信頼性に深く関係する活性度(快/不快などの情動)を推定するには、活動中の犬に電極を固定し、心電を計測することが必要です。これまでの知見で、心電から得られる心拍変動指標(HRV)と快/不快の情動に関係があることが統計的に示されています参考文献2)。また、機械学習の方法を使用して快/不快情動の推定が可能なことが示されています参考文献3)。非侵襲な計測方法を利用することで、活動する犬に負担をかけずに生体情報を計測する必要があります。また、活動中の心電には、筋電などがノイズとして混在するため、信号の信頼性を評価しながら、快/不快の情動を判定することが必要です。
そこで、本研究グループでは、心電計を搭載したサイバースーツで、非侵襲な方法で心電を計測し、心拍変動指標(HRV)から機械学習(人工知能)の手法を利用して快/不快の情動を判定することに挑戦してきました。今回は、皮膚に電極を固定する犬用インナーウェアの開発、心電と慣性センサを融合した快/不快の情動の判定技術により課題の解決に至りました。
<研究の内容>
(1) 全体像
本研究グループでは、上記の課題を解決するために、1.心電と行動を同時に非侵襲な方法で計測する新たなサイバースーツと、2.心電計と慣性センサのデータに基づいて快/不快の情動を推定する人工知能アルゴリズムと、3.異なる場所にいる複数の人間がリアルタイムに結果を共有する表示方法を開発しました参考文献4)。
新しいサイバースーツは、心電計測装置、慣性センサ、カメラ、マイク、GPSなどのセンサと、センサデータを記録/解析するオンボードコンピュータと、インターネットに情報を送信する通信装置を搭載した、重さ約1.5kgの犬用ベストです。慣性センサを利用して、犬の行動を計測します。従来と同様に、カメラ映像と音声とGPSの位置情報を、ネットワークを介してクラウドサーバに登録します。新しいサイバースーツでは、これらに加えて、心電から検出したR波の間隔(RRI注3))と慣性センサの情報も、ネットワークを介してクラウドサーバに登録します。データは、ウェブサイトを介してクラウドサーバの情報を読み取り、表示されますので、データを閲覧したい人は、ウェブブラウザをインストールしたタブレット端末や、パソコンがあれば、リアルタイムに犬の現在位置と移動軌跡に加え、RRIや快/不快の情動の推定結果を確認することができます。
(2) 新規開発技術
本研究グループでは、心電計測に基づく快/不快の情動とそれが信頼できるか判定するために、次の3つの新しい技術を開発しました。
1.電極を皮膚に密着させる犬用インナーウェアとサイバースーツの開発
心電計測注4)では、3つの電極(プラス極、マイナス極、グランド)を、犬の胸部から腹部にかけて設置する必要があり、専門的な知識をもった人が電極を設置していました。犬にインナーウェアを着せるだけで必要な箇所の皮膚に、密着して電極を設置する方法を開発しました(図2)。装着者が、電極を付ける位置に関して詳細な知識がなくても犬に心電計測用の電極を設置できるようになりました。また、ゴム素材を利用したバンドとマジックテープを利用して電極を表皮に密着させることで、運動時に立位や伏せなど大きく姿勢が変わると電極が浮いてしまい、心電を計測出来ないという課題も解決しました。
また、インナーウェアの電極を利用した心電計と慣性センサを搭載した、中型・大型犬用のサイバースーツを開発しました。
2.心電と慣性センサを融合した快/不快の情動を判定するアルゴリズム
心電計測装置で計測したRRIと慣性センサで計測した活動量は、ネットワークを介してクラウドサーバに登録されます。パソコンでクラウドサーバにアクセスし、取得したRRIから計算した心拍変動指標(HRV)に基づき機械学習を用いて犬の快/不快の情動を判定します(図3)。判定された快/不快の情動は、クラウドサーバから取得した活動量に基づいた判定結果と、それが信頼できるかの判定結果の表示とともに、端末上でリアルタイムに視覚化されます。
3.異なる場所にいる複数の人間がリアルタイムに結果を共有する表示方法
ネットワーク上のクラウドサーバを介して、犬の現在位置、RRI、快/不快の情動の判定結果を受け取り、画面上に表示する方法を開発しました(図4)。ウェブ技術を利用して表示方法を開発することで、ブラウザがインストールされているタブレット端末や、パーソナルコンピュータで、複数の人間が同時に、同じ情報を数秒の遅れで共有することが出来るようになりました。救助犬による被災者探査では、犬のハンドラー注5)や、災害指揮本部の消防隊などが、犬の探査結果を同時に共有することが出来るようになります。
(3) RRIの計測と快/不快情動の推定
電極を犬の体表に密着させる犬用インナーウェアにより、犬が活動中のRRIを計測することができます。従来の固定方法では活動中にR波の検出率が51.7%であったものが、犬用インナーウェアにより81.9%に改善されました。心電図の波形からも、犬用インナーウェアにより電極が体表から離れないことにより活動時にも心電図が計測できていることがわかります(図5)。
RRIから計算したHRVに基づき、犬が静止/歩行時に快/不快情動を73.6%の精度で判定することができます。犬が活動中にもリアルタイムに犬の現在位置、RRI、快/不快の情動を画面上で表示されることが確認できました(図6)。
また、東北大学青葉山新キャンパスで開催されたImPACTタフ・ロボティクス・チャレンジの実証実験(非公開)でも、運動中の快情動の推定が可能なことを確認しました(図7)。
<今後の展開>
犬の生体情報に基づいて快/不快の情動を判定できるようになったことから、今後は災害救助犬などの使役犬に応用し、探査を継続することに不快を覚えた時に適切に休憩をとらせること、快の時は継続して探査を行うことで、探査の信頼性を維持しつつ、被災者を発見することを目指します。また、快/不快の情動以外の犬の情動を推定する技術にも拡張します。この技術の発展が、犬が感じたことを人間が共有する、人と犬の新たなコミュニケーション方法の開発に繋がると期待します。
<参考図>
図1 犬の情動をリアルタイムに推定するサイバースーツのシステム構成
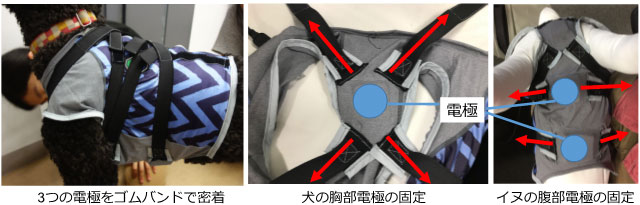
図2 電極を皮膚に密着させる犬用インナーウェア
図3 心電と慣性センサを融合した快/不快情動の判定アルゴリズム
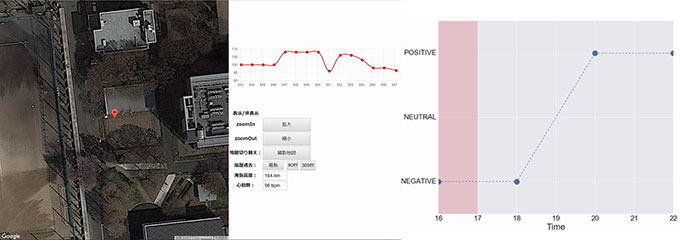
図4 犬の活動中の快/不快の情動の判定の画面表示
図5 活動中の犬の心電図と加速度
(左)従来の電極の固定方法、(右)インナーウェアを利用した電極の固定方法

図6 RRIからの犬の活動中の快/不快情動の推定結果

図7 ImPACT TRCの実証実験で運動中の快情動を予測
右上が探査軌跡とRRI(赤線グラフ)と情動判定(青線グラフ)の表示結果
<用語解説>
- 注1) Heart Rate Variation(HRV)
- 心拍変動指標。RRIの時間的な変動を表す指標。
- 注2) 慣性センサ
- 正確には慣性計測装置(英語:Inertial Measurement Unit、略称:IMU)であり、物体の運動を司る3軸の加速度と角加速度を検出する装置。
- 注3) RRI
- 心電図のR波とR波の間の間隔。
- 注4) 心電計測
- 心臓の活動を電気的に計測する方法。波形からP波、Q波、R波、S波を検出し、解析をおこなう。
- 注5) ハンドラー
- 犬のハンドリングをおこなう人。
<参考文献>
- 1) “サイバー救助犬,”大野 和則,日本ロボット学会学会誌 pp.7-10, Vol. 35, No. 2, 2017. 3.
- 2) “Heart rate variability predicts the emotional state in dogs,” M. Katayama, T. Kubo, K. Mogi, K. Ikeda, M. Nagasawa, T. Kikusui, Behavioural Processes. 2016 Jul;128:108-12. doi: 10.1016/j.beproc.2016.04.015.
- 3) “Canine emotional states assessment with heart rate variability,” E. Nakahara, Y. Maruno,T. Kubo, R. Ouchi, M. Katayama, K. Fujiwara, K. Ikeda, In Signal and Information Processing Association Annual Summit and Conference (APSIPA), 2016 Asia-Pacific (pp.1-3) 2016/12.
- 4) “Real-Time Emotional State Estimation System for Canines Based on Heart Rate Variability,” R. Hamada, K. Ohno, S. Matsubara, T. Hoshi, M. Nagasawa, T. Kikusui, T. Kudo, E. Nakahara, K. Ikeda, S, Yamaguchi, T. Yamakawa, S. Tadokoro, 2017 IEEE International Conference on Cyborg and Bionic Systems (CBS 2017)2017/10.
<お問い合わせ先>
<研究に関すること>
大野 和則(オオノ カズノリ)
東北大学 未来科学技術共同研究センター 准教授
〒980-0845 仙台市青葉区荒巻字青葉468-1 レアメタル総合棟101
Tel:022-752-2165
E-mail:
濱田 龍之介(ハマダ リュウノスケ)
東北大学 未来科学技術共同研究センター 助教
〒980-0845 仙台市青葉区荒巻字青葉468-1 レアメタル総合棟101
Tel:022-752-2165
E-mail:
菊水 健史(キクスイ タケフミ)
麻布大学 獣医学部 動物応用科学科 教授
〒252-5201 神奈川県相模原市中央区淵野辺1-17-71
麻布大学獣医学部伴侶動物学研究室
Tel:042-769-1853
E-mail:
<ImPACTの事業に関すること>
内閣府 革新的研究開発推進プログラム担当室
〒100-8914 東京都千代田区永田町1-6-1
Tel:03-6257-1339
<ImPACTプログラム内容およびPMに関すること>
科学技術振興機構 革新的研究開発推進室
〒102-0076 東京都千代田区五番町7 K’s五番町
Tel:03-6380-9012 Fax:03-6380-8263
E-mail:
<報道担当>
東北大学 総務企画部 広報課
〒980-8577 宮城県仙台市青葉区片平2-1-1
Tel:022-217-4977 Fax:022-217-4818
E-mail:
科学技術振興機構 広報課
〒102-8666 東京都千代田区四番町5番地3
Tel:03-5214-8404 Fax:03-5214-8432
E-mail: