研究課題名
人と知能機械との協奏メカニズム解明と協奏価値に基づく新しい社会システムを構築するための基盤技術の創出
プロジェクト実施期間
2016年度~2021年度(共創プラットフォーム型)
幹事機関、領域統括(所属)
東海国立大学機構名古屋大学 武田一哉(未来社会創造機構 教授)
参画機関(大学等、企業等)
名古屋大学、早稲田大学、東京工業大学、産業技術総合研究所、九州工業大学、豊橋技術科学大学
めざす未来
あらゆる現場で人間と機械とが協奏的に働く社会を目指します。そこでは、人間と機械の協奏現場をデータ化する、標準的な情報プラットフォームが存在しており、多様な機能(センシング・可視化・機械制御・データ解析)を、柔軟に組み合わせて、安価に人間機械協奏システムを構築することが可能となります。
研究のポイント
(1)ストレス計測のような先端的な人間センシング技術や、屋内位置の計測技術、作業行動のモデリングといった要素技術をオープンソースで開発しています。
(2)コンソーシアム参画企業・機関が協力して、要素技術を統合した人間機械協奏システムのプロトタイプシステムを、倉庫物流現場で実証評価しています。
ここがすごい
唾液からストレスマーカーを検出する技術や、自動運転オープンソース autoware を発展させた音声・ジェスチャ・視線・バイオ信号の利用、高度な可視化機能を付加したHarmoware、自動車運転を対象とした実環境下の大規模運転行動データベース等、ヒトと知能機械との協奏メカニズム解明と協奏価値に基づく新しい社会システムを構築するための基礎技術を創出しています。
企業への一言
自動運転技術の普及により、新たに創出される次世代のロボット技術「人間機械協奏」。この技術を製造・物流・サービスに活用して大きな市場を創造するにするために、産官学の知恵を持ち寄りましょう。
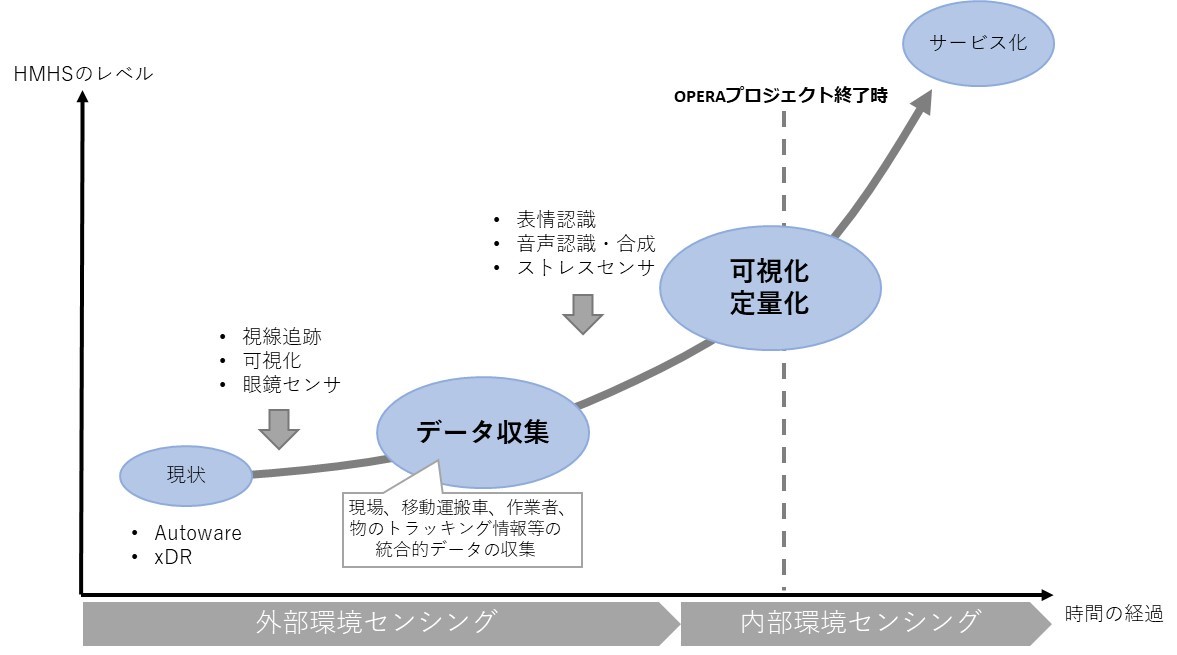
人間機械協奏のレベルとコンソーシアム研究計画
自動運転ソフトAutowareをベースに、様々なセンシング技術や認識技術を開発・共有して、人間機械協奏現場のデータ化に取り組む。また、実証実験を倉庫物流現場で行う事によって、要素技術の評価と応用可能性の検証を行う。

倉庫内物流実証実験の様子 / Experiment of logistics in the warehouse
HMHSコンソーシアムでは、オープンソースで開発を進めている人間機械協奏ライブラリ Harmoware の実環境での検証を目的として、自動配送ロボットによる倉庫内物流を対象として人間機械協調実験を実施している。Harmoware は複数の機能モジュールから構成されており、必要・環境に応じたモジュールを選択的に利用可能である。現在は、複数のロボットによる人間機械協調により、ピッキング作業の効率化や作業環境の快適性向上を目指している。

職場で簡単に使えるストレスマーカーセンサの開発 / Development of a stress marker sensor that can be easily used in the workplace
意識しないうちに体にためこんでしまうストレスを、ごく微量の唾液や汗からその中に存在する複数のストレスマーカーを検出し、その変動をモニター・解析することで把握する。これにより、職場のストレスに対する早めの対処を可能にし、QOW(仕事の質)の向上に役立てることを目指す。
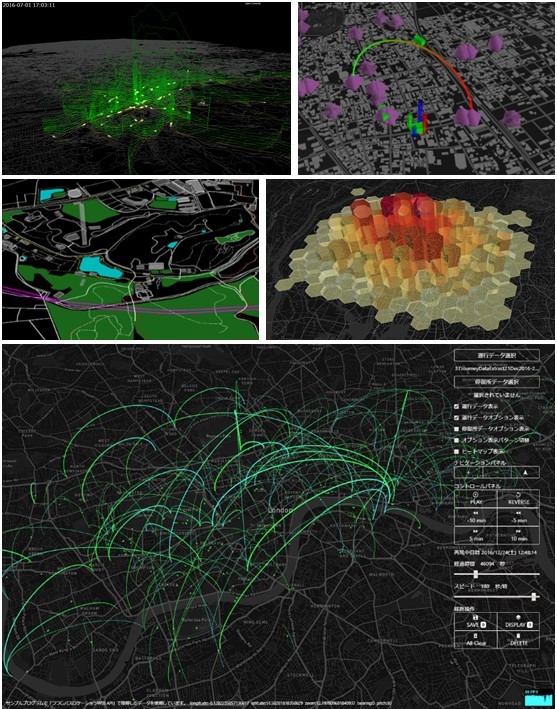
Harmoware-VISよる動的な時空間可視化 / Dynamic visualization using Harmoware-VIS
Harmoware-VISは、名古屋大学が開発を進めているnode.js 向けのオープンソース時空間可視化ライブラリです。Synerexと呼ばれるミドルウェアとの連携により、時間と共に変化する動的な空間情報の可視化も簡単に実現できます。日々更新していますので、随時機能アップしています。動作は以下の動画を見て頂くのがわかりやすいです。 YouTube動画: https://youtu.be/Px1P7QIcZlY
国立研究開発法人科学技術振興機構
イノベーション拠点推進部
〒102-0076 東京都千代田区五番町7 K’s五番町
 アクセス
アクセス
TEL:03-6272-3816
e-mail:opera[at]jst.go.jp ※[at]を”@”に置き換えてください。