トップページ > 研究代表者・研究課題 > 前田 太郎
研究代表者・研究課題
【平成17年度採択】
【平成18年度採択】
【平成19年度採択】
パラサイトヒューマンネットによる五感情報通信と環境センシング・行動誘導

前田 太郎
大阪大学大学院 情報科学研究科 教授
研究概要
本研究では「パラサイトヒューマン」というウェアラブル技術を利用して、リアルタイムに人間情報を計測すると同時に安心安全を実現する直観的な情報支援をフィードバックするために、行動誘導の機能を持つ双方向機能ノードとして装着者自身を環境ネットに接続することを提案します。これによって生活環境内で活動している人間自身を環境計測と物理的反映システムの最大の機能リソースとして捉え、人間自身の知覚とこれに対応する行動を計測および誘導システムの一部として利用して、環境センシングと行動誘導の統合化を実現する技術を開発します。こうして形成された人間情報を扱う「パラサイトヒューマンネット」を従来の物理情報を扱う環境センサネットと統合することで環境情報を利用した個人レベルの安心安全ばかりでなく、社会としての群レベルでの安心安全を提供するシステムを構成し提供する技術を追求します。
重要技術
「パラサイトヒューマン」は装着者に対するコンピュータ端末としてではなく、装着者を含む外界環境に対して人間と同様に感覚情報を取り込み、自ら運動する代わりに装着者に対して行動要求を出すようになる、共生型の装着システムです。このシステムにネットワークを介して接続する「パラサイトヒューマンネット」を利用することで、1対1ユーザの間でスキルの伝達を実現することや、集団行動における適切な誘導を行うことができます。
図1 スキルの伝達を可能にするパラサイトヒューマンネット
実証実験
(1)個人レベルでの安心安全をもたらす技術
パラサイトヒューマン(以下PH)と環境センサネットの融合が機能することによって装着者自身にもたらされる安心安全を実現するための各種要素技術の実現と実証を目指します。PHによって人間情報を計測すると同時に安心安全をフィードバックするための行動誘導の機能を持つ双方向機能ノードとしてPH装着者自身を環境ネットに接続すること(=センサネット環境における観測と働きかけを同時に実現する機能ノード化)によって、リアルタイムでの半自動危険回避・最適手順教示・救急通報といった「安全」の享受と、装着者の行動情報から個人特性を吸収・一般化してネット上のセンサノードとしての公開情報として供給する事による個人情報保護(個人情報の匿名化によるファイヤウォール機能)の「安心」を担保します。また特にネットを経由したPHがもたらす五感情報伝送の機能による体験共有の実現は、従来は人間と人間類似型ロボットの間でしか行えなかったテレイグジスタンス作業を人間と人間の間の協調作業として実現することを可能にします。これによって緊急時の現場にたまたま居合わせた素人の協力者(PH装着者)に対して警察や消防などの緊急対策のプロによるリアルタイムの現場対応にPHを通じて直観的な遠隔協調作業として実現できます。これは従来、緊急時の極限作業ロボット技術においてテレイグジスタンス作業を実現するためには作業用スレーブロボットを現地まで輸送し現場に送りこまねばならなかったという時間的・空間的な対応の遅れの問題点を解消できます。同時に緊急時に誤解や混乱をもたらしやすい言語情報ではなく、直接的・直観的な非言語情報によって行動自体を直接的に支援することでより迅速で確実な協力者の行動を誘導することを可能にします。一分一秒を争う救急救命や初期消火対応などにおいて熟練者の判断による直観的行動の伝達支援、即時対応の遠隔協調作業の実現によって救われる命を増やし災害の拡大を未然に防げる可能性を拡大します。このように単に現場の協力者自身を安心・安全に誘導するだけでなく、現場の状況改善を可能な限り迅速に実行するための熟練者の判断と行動技能を協力者に直観的な形で伝えることで、緊急時の状況対処能力と現場の人々の安全確保の可能性を大幅に向上させることができると期待しています。
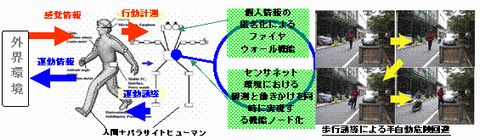
図2 環境から個人への安心安全の供給
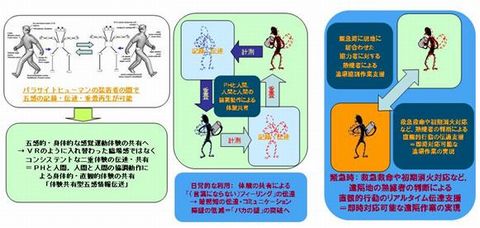
図3 五感情報伝送と体験共有による遠隔協調作業・コミュニケーションの実現
(2)群レベルでの安心安全の供給
群衆にPHの装着者が一定量含まれる状況において群レベルでもたらされる安心安全の技術的実現と実証します。前述のような現場のPH装着の協力者を中心とした個々人レベルの現場対応だけに留まらず、複数のPH装着個体の行動情報を同様の行動モデルの群活動として俯瞰する群情報処理によって「群としての状態・意図推定」をすることで、既存の物理センサ情報からでは抽出不能な社会的文脈や総合的状況を加味した現象抽出や異常検出、未知状況・想定外状況に対する対応、環境センサの空白領域の状況推定や予兆発見などが可能となります。
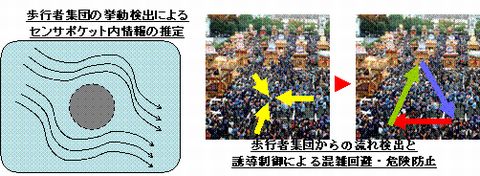
図4 個から群への安心安全の供給
また、この情報をもとに装着者の行動を誘導することが同時に非装着者へ情報伝達の手段となり、群全体の行動を誘導することができます。こうした群としてのPH装着者の行動情報を俯瞰的に統合することによる異常検出や、群行動の誘導による混雑回避・避難誘導等にもとづく群レベルでの社会的安心安全の実現をめざします。
(3)非言語レベル意図の推定と一般化を可能にする学習モデルの実現
上記目標を実現化するための柱となる技術が、PHによる行動の物理的な計測結果から個人差や個体差を吸収した上での等価性・一般性をもった非言語レベル意図の推定とその通信を可能にする学習モデルの実現です。ここで推定される意図とは言語的な抽象思考レベルのものではなく、具体的で直観的な「行動に直接的に対応した非言語レベルの意図」を指します。