| 論文名 |
The Central Nervous System Stabilizes Unstable
Dynamics by Learning Optimal Impedance
(脳は最適なインピーダンスを学習し巧みに不安定な状態を安定化させる) |
| |
| 箸で大豆をつまみあげたり、のみで凸面を削ったりするとき、ちょっとした手元の狂いや表面のでこぼこのせいで、予測できない方向に箸先や手先がはずれてしまう。対象物と接するときにはしばしばこのような不安定な状態が生じる。科学技術振興事業団創造科学技術推進事業(ERATO)川人学習動態脳プロジェクトとシンガポール大学は、人間がどのようにして不安定な状態に対処してうまく目的の運動を遂行しているかを高性能のマニピュランダムを用いた行動実験によって調べた。その結果、脳が外界の状態に応じて、巧みに抵抗力の大きさと方向、形を最適になるように調節していることが明らかになり、従来の、「抵抗力の方向や形をかえるような微妙な制御は人間にはできない」という考え方は覆された。この成果は英国科学誌「ネイチャー」(平成13年11月22日発行)に掲載される。 |
| |
| 研究実施機関 |
| |
| 科学技術振興事業団 創造科学技術推進事業 川人学習動態脳プロジェクト |
| |
元研究員 |
大須 理英子 |
(現 ATR人間情報科学研究所) |
| |
総括責任者 |
川人 光男 |
(ATR人間情報科学研究所) |
| シンガポール国立大学 |
| |
助教授 |
エティエンヌ ブルデ |
|
| サイモンフレーザー大学 |
| |
学生 |
デイビッド フランクリン |
(ATR人間情報科学研究所) |
| |
準教授 |
セオドール ミルナー |
|
|
| |
| 概要 |
| |
ものを扱って作業をするとき、なかなか自分の思うとおりにいかなくていらいらしたことはないだろうか。はしで丸くてつるつるする大豆をつまみあげたり、のみで凸に膨らんだ面を削ったりするところを想像してほしい。例えば、のみでまっすぐに削るつもりでも、ちょっとした手元の狂いや、ちょっとした表面のでこぼこのせいで、まっすぐ進まず右にはずれたり左にはずれてしまったりする。しかもどっちの方向にはずれるか前もって予測できない。このような作業でも、練習を重ねるとうまくできるようになる。いったいどのような機構によりこのような不安定な状態に対処できるようになるのだろうか。
科学技術振興事業団創造科学技術推進事業(ERATO)川人学習動態脳プロジェクトとシンガポール大学は、人間がどのようにして不安定な状態に対処してうまく目的の運動を遂行しているかを「平行リンク空気磁気浮上型マニピュランダム」(Parallel-link
direct-drive air and magnet Floating Manipulandum、PFM)という装置を用いた行動実験により明らかにした。平面上を滑らかに動くPFMの先端を握って動かしているときに、握った先端に力を加えることにより仮想的に様々な状態を作り出すことができる。手先をまっすぐに前に伸ばすと何も起こらないが、少しでも右にずれるとさらに右に引っ張られ、少しでも左にずれるとさらに左に引っ張られるような力の場をつくって、その中で手先を前に伸ばす練習してもらう。はじめは失敗するが、徐々にうまくまっすぐ動かすことができるようになる。十分練習した後、腕の外乱に抵抗する力(スティフネス)を測定すると、この抵抗力は、外乱が加わる左右方向には大きくなり、外乱が加わらない運動方向にはあまり変化していなかった。また、左右方向の大きさは、外乱を押さえ込むのに必要十分なだけの大きさになっていた。これは、外界の状態に応じて、脳が巧みに抵抗力の大きさと方向、形を最適になるように調節していることを示す。従来の、「抵抗力の方向や形をかえるような微妙な制御は人間にはできない」という考え方は間違っていたことが明らかになった。
この結果は、人間の脳が、訓練することによって従来考えられていた以上に巧みに腕をコントロールできることを実証した。不安定な状態は人間が対象物と接する場合に必ず起こるものであり、このような人間の特性を知ることは、脳研究の分野で重要であるだけではなく、効果的な義肢や、心地よいマンマシーンインターフェイス、性能の良いテレオペレーションシステム等を開発するのに重要である。 |
| |
| 研究の背景と内容 |
| |
| スティフネスとは |
| ペットをなでるときは柔らかい腕が、ボクシングで相手にパンチを食らわすときには、硬くなる。このように、人間は体の硬さを調節することができる。この硬さは、もう少し正確に言うと、外乱に対する抵抗力と考えられる。すなわち、腕が柔らかい場合は何かものに当たるとそれをなぞって進むのに対し、硬い場合はものに当たってもそれに抵抗して予定通りの軌道を進もうとする。この抵抗力を総称してインピーダンスといい、特に位置の外乱に対する抵抗力をスティフネスという。これらの抵抗力は、筋肉のもつバネのような特性、すなわち伸ばされるともとに戻ろうとする力を発生するという性質に由来しており、ぐっと力を入れて筋肉を活性化することで強くすることができる。この抵抗力は方向性を持っており、例えば手先では、通常肩に向かう方向(前後)のほうが強く、左右方向のほうが弱い。例えば,コーヒーカップをもった腕に、横からぶつかったときのほうが、正面からぶつかったときよりコーヒーをこぼしやすい。 |
| |
| 不安定な状態 |
| 何かがぶつかってコーヒーを多少こぼしても、何とか持ちこたえてコーヒーカップをもとのように持ち直すことができる。このように、小さな外乱に対しては抵抗力が働き、ほぼ予定通りの動きができる状態を「安定な状態」という。それに対して、前述のように、箸で豆をつまんだり、のみで凸に膨らんだ面を削ったりするときには、小さな外乱が増幅され、回復が難しい。しかもどちらの方向にそれていくかは外乱に依存するためあらかじめ予測することはできない。このような状態を「不安定な状態」という。 |
| |
| 従来の考え方 |
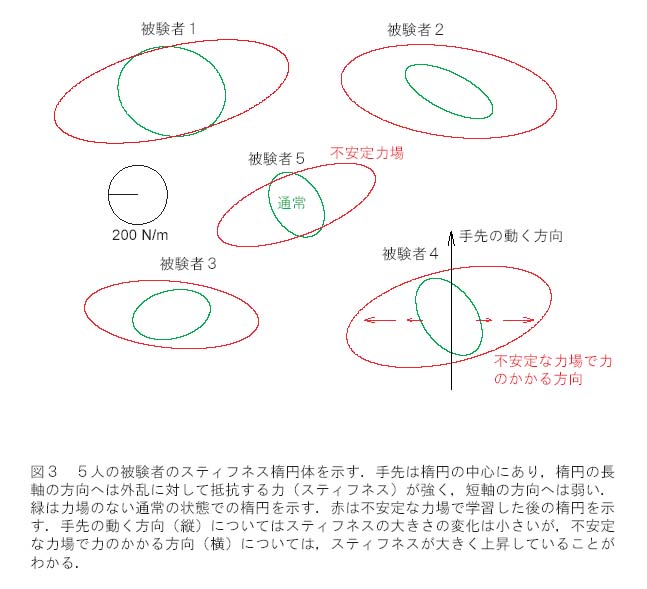
| このような、小さな外乱が失敗をまねくような不安定な状態において目的の動きを達成するには、何らかの方法で状態を安定化させなければならない。はじめに述べたように、ぐっと力をいれることで抵抗力を上昇させることがひとつの有効な手段であると予測できる。ロボティクスの分野では、16年ほど前にすでに、図3に示したように、外界の状態に合わせて抵抗力の大きさや方向、形をコントロールする「インピーダンス・コントロール」の概念が提案され、同時に人間のモデルとしても検討されはじめた。しかし、神経科学の分野では、人間がこの抵抗力をコントロールする能力は非常に限られていて、その形や方向は、姿勢と手先の発生する力に依存してほぼ決まっており、積極的に変更できるのは大きさだけであると考えられてきた。また、従来の研究の主流は安定な状態における運動の制御や学習であり、不安定な状態における運動の制御や学習については、抵抗力を測定することが難しいということもあり、ほとんど解明されてこなかった。 |
| |
| 今回の実験の目的 |
| 本実験においては、高性能のマニピュランダム(平行リンク空気磁気浮上型マニピュランダム、PFM 図1)をもちい、不安定な状態を人工的に作り出し、そのなかで運動を学習させた。そして、学習前後におけるスティフネスの変化を測定し、人間が抵抗力を調節する能力を調べた。 |
| |
| 実験の方法 |
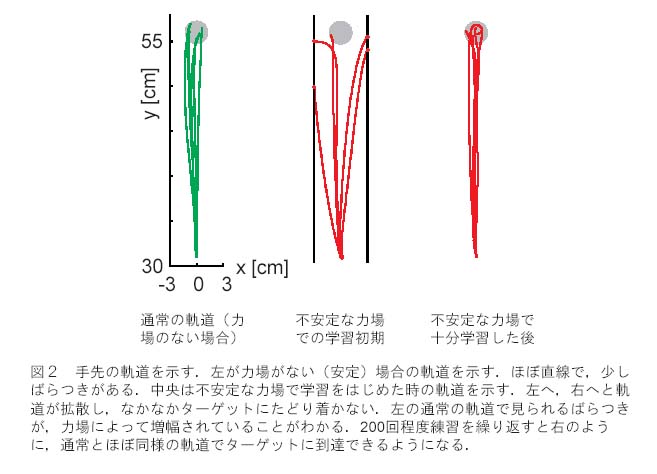
| 被験者には、肩の高さの平面上で、PFMの先端を握って、25cmほど前にあるターゲットに向かって手先をまっすぐ前に動かすという運動(図1)をしてもらう(手首は固定、肩、肘のみを使った運動)。このとき、手先が直線上を動けば何も起こらないが、直線からの距離に依存して、右にずれるとさらに右に、左にずれるとさらに左に、PFMが腕を引っ張る。すなわち、左右の方向にだけ不安定な力場である。被験者の手先は、はじめは右に、左にとはずれてしまい(図2中央)、ターゲットに到達しないけれど、練習するに従ってターゲットに到達できるようになる(図2右)。十分練習した後、PFMで手先に小さな外乱(位置摂動)を加える、という方法で、手先のスティフネスの性質を調べた。 |
| |
| 実験の結果 |
| このような平面上での手先のスティフネスの性質は楕円で表現することができる(図3)。楕円の長軸の方向には抵抗力が大きく、短軸の方向には抵抗力が小さい。不安定な力場における学習後の楕円の形(赤)を、学習前の力場がない安定な場合(緑)と比較すると、学習後には不安定な左右方向に選択的に抵抗力が上昇し、前後方向には変化が見られなかった。また、左右方向のスティフネスの上昇度合いを調べると、力場がない場合と同程度の安定性を確保するのに必要十分なだけの値であった。このとき、手先が発生する力は、力場がないときとかわらず、スティフネスの上昇は、手先が発生する力とは独立に行われている。すなわち、全く同じ運動を、スティフネスを変化させた状態で実現することができることを示す。また、このスティフネスの上昇は、外乱を検出してからそれに反応しておこっている(フィードバック)のではなく、あらかじめ推測される外乱の大きさから必要な運動指令を計算し、予測的に行われている(フィードフォワード)こともわかった。 |
| |
| 結果から得られたこと |
| |
| 実験の結果から、人間は、外界の状態を学習し、抵抗力の大きさのみならず、その方向、形を最適になるように筋活動を調節し、効率よく安定性を獲得していることがわかった。このような微妙な調節をすることで、エネルギーの無駄を省き、疲労を軽減させることができる。この結果は、人間は抵抗力の微妙なコントロールはできないという従来の見解を覆すものであり、それをはじめて実験的に証明した。 |
| |
| 研究の意義と展望 |
| |
| 不安定な状態は人間が対象物と接する場合にしばしば発生するものである。しかし、近年の生体を対象とした運動制御、学習の研究は安定な状態のなかでの研究が主流になっており、偏っていた。本研究は、運動制御におけるもう一つの重要な側面にスポットライトをあてたという点で意義深い。また、工学的な側面でも重要である。例えば、義肢などを開発するにあたって、より本物の腕に近いものにするためには、力のコントロールだけではなく、このようなインピーダンス・コントロールの機能が必要になってくる。また、遠隔操作の実用化、例えば、遠隔操作で手術をするといった状況になると、力の伝達だけでなく、インピーダンスの伝達も重要になってくる。このように、マンマシーンインターフェイス、また医療、リハビリテーションの現場などに重要な示唆を与えると期待される。 |
| |
| 用語説明 |
| |
| Central Nervous System 中枢神経系と訳される。脳、脊髄を総称していう。 |
| |
| |
| (参考資料)創造科学技術推進事業について |
| |
| |
この研究についての問い合わせ先:
(研究内容について)
科学技術振興事業団 創造科学技術推進事業 川人学習動態脳プロジェクト
技術参事 松島 宏司
TEL 0774-95-1201 FAX 0774-95-3001
(事業について)
科学技術振興事業団 戦略的創造事業本部 研究推進部
創造研究課長 長谷川 奈治
TEL 048-226-5623 FAX 048-226-2144 |
|
{kind=link}
{kind=link}
{kind=link}