JST 課題解決型基礎研究事業の一環として、大阪大学 大学院工学研究科の浅田 稔 教授らは、人間とロボットの認知発達過程を理解するために、人間の子ども型ロボット「M3-Kindy(エムスリー・キンディー)」と乳児型ロボット「Noby(ノビー)」を開発しました。
複雑な人間社会において人間と共存するロボットを実現するためには、ロボット自らが多様な認知行動能力を学習・発達できる機能が重要であり、そのためには人間の認知発達メカニズムの理解は欠かすことができません。近年、人間科学とロボット工学の融合による「認知発達ロボティクス」研究が発展し、ロボットを通じた人間の認知発達メカニズムの理解と、それに基づくロボットの認知発達研究が活発になってきています。これら認知発達ロボティクスの研究においては、人間の乳幼児や子どもに近い形(ヒト型)、運動性能、感覚機能を兼ね備えたロボットが必要となります。
本プロジェクトでは今回、乳幼児および子どもの時期の認知発達メカニズムを理解するために、2種類のヒト型ロボットを開発しました。
子ども型ロボット「M3-Kindy」(図1)は、5歳児程度の大きさのロボットで、高い運動性能、表情表出機能、多様な感覚機能を備えており、親と子どもの間のさまざまな相互作用を伴う発達モデルの仮説を検証するためのロボットです。
一方、乳児型ロボット「Noby」(図2)は、9ヵ月児の身体特性と感覚運動機能を高精度に再現したロボットです。Nobyを通じて得られた認知発達データと実際の人間を詳細に比較することで、新たな認知発達モデルの発見とその検証・改良に役立ちます。
M3-KindyやNobyを用いた認知発達ロボティクス研究により、今後人間の認知発達メカニズムへの深い理解が進み、人間らしい仕組みが取り入れられた、人間と自然に関わることのできるロボットの実現につながることが期待されます。
本成果は、以下の事業・研究プロジェクトによって得られました。
戦略的創造研究推進事業 ERATO型研究
| 研究プロジェクト |
: |
「浅田共創知能システムプロジェクト」 |
| 研究総括 |
: |
浅田 稔(大阪大学 大学院工学研究科 教授) |
| 研究期間 |
: |
平成17年度~平成22年度 |
本研究は、「浅田共創知能システムプロジェクト」の社会的共創知能グループ(グループリーダー:石黒 浩 大阪大学 大学院基礎工学研究科 教授)と対人共創知能グループ(グループリーダー:國吉 康夫 東京大学 大学院情報理工学系研究科 教授)が行いました。
子ども型ロボット「M3-Kindy」は大阪大学の石黒 浩 教授との共同研究の成果を含みます。また、乳児型ロボット「Noby」は東京大学の國吉 康夫 教授および産業技術総合研究所の長久保 晶彦 研究員との共同研究の成果を含みます。
<研究の背景と経緯>
人間は成長していく過程でさまざまな機能を学習・発達させていきますが、その詳細なメカニズムの全容はいまだ明らかになっていません。
人間がどうやって学習・発達していくのか。この謎を解くための新しいアプローチとして、本プロジェクトでは、ロボット工学の「作ることによって知る」方法と発達心理学、認知科学、脳科学など人間科学の「観察することによって知る」方法とを融合させた研究を行っています。ロボットを通じて人間の認知発達のメカニズムを理解する「認知発達ロボティクス」は、人間のように振る舞えるロボットを用いて、さまざまな学習・発達プログラムとそれに基づくロボットの振る舞いを調べることで新たな知見を得る、新しい切り口の認知発達研究です。こうして得られる新しい知見は、自ら適応・学習・発達し、複雑な人間社会において、人間と共存できるロボットの構築に役立つと考えています。
認知発達ロボティクスでは、学習・発達プログラムを試すための共通基盤(プラットフォーム)としてのロボットが研究の鍵を握っています。認知発達ロボティクスのさらなる発展には、専門性の少ない研究者でも容易に使える「普及型研究用プラットフォーム」と、ロボットと実際の人間の認知発達データをより高い精度で対応付けるための「高精度プラットフォーム」のそれぞれが必要となります。今回発表する2種類のロボットは、これらを達成するためのものです。
<本研究の成果>
本研究では、子どもサイズの普及型研究用プラットフォーム「M3-Kindy(エムスリー・キンディー)」と9ヵ月乳児をモデルとした高精度プラットフォーム「Noby(ノビー)」を開発しました。
(1)子ども型ロボット:M3-Kindy
M3-Kindyは、親や他人との間の相互作用を伴う子どもの学習・発達に関する研究を行うためのロボットで、ロボットに関する専門知識のない研究者でも容易に使いこなせる普及型研究用プラットフォームの1つとして開発されました。M3-Kindyは、体重約27Kg、5歳児程度の大きさで、名前のM3は[WO]MAN MADE [WO]MAN(人造人間)に由来し、Kindyは幼稚園児程度の年齢の子どもをイメージして、幼稚園を表すKindergartenにちなんで名付けられました。
M3-Kindyは自立するヒト型ロボットで、全身42個のモーターで子どもの複雑で動的な動きを模倣させるとともに、顔の柔らかい皮膚(発泡ウレタン)により自然な表情を作り出します。また、顔や物体、音声、接触などを認識させるために、頭部には視聴覚としてのカメラ2個とマイクロフォン2個を搭載し、全身には109個の触覚センサーが備えられています。これらの全身モーターや各種センサーは内蔵コンピューターによって制御されますが、普及型研究用プラットフォームとしてロボット専用のOSを持たず特殊なアクセス環境を必要としないため、ユーザーが自由な環境で制御プログラムを設計・開発することができます。
本プロジェクトでは、これまでにも普及型研究用プラットフォームとして赤ちゃんロボット「M3-Neony(ネオニー)」や集団コミュニケーションロボット「M3-Synchy(シンキー)」を開発していますが、M3-Kindyは表情生成や物体操作などの機能を備えるとともに、5歳児程度の体の大きさを有することで、「親と子どもの手遊び」や「親が子どもの手を引いて一緒に歩く」というような親子間の身体的相互作用を実現できるようになりました。
(2)乳児型ロボット:Noby(Nine-month old baby)
生後9ヵ月頃の人間の乳児は運動機能と認知機能が劇的に発達し、「9ヵ月革命」と呼ばれるほど重要な時期です。Nobyは9ヵ月児をモデルにした、身長71cm、重量7.9kgの乳児型ロボットで、人間との精密な比較により、乳幼児の認知行動発達を研究するための研究用のロボット・プラットフォームです。全身を覆う柔らかい皮膚には600個の触覚センサーが付いており、また頭部には視聴覚としてのカメラ2個とマイクロフォン2個を備え、外部環境を感知することが可能です。
ロボットの体格や運動特性を研究対象となる人間にできる限り近づけることは、全身運動の状態と運動に基づく知能創発を研究する上でとても重要です。Nobyでは、頭部、上半身、下半身などの身体各部の重量配分や、腕や脚などの太さについても9ヵ月児の平均値に合わせて作られています。また、関節は乳児なみの可動域を有し、筋骨格系特有の運動特性を再現することができます。これらは、本プロジェクトが開発した独自の駆動機構や超小型内蔵制御モジュール、触覚センサー技術などを用いることによって実現可能となりました。
Nobyが9ヵ月児の身体的特徴を良く備えることにより、全身触覚センサーのデータから乳児が感じていることのシミュレートや、目新しい対象物に対する好奇心の発達モデル(学習の基盤)などを調べることができます。最終的には、人間の初期発達原理をモデル化してNobyに実装し、その結果の振る舞いや発達過程を人間と詳細に比較することで、モデルの検証や修正を行うことを目指しています。
<今後の展開>
本プロジェクトでは認知発達ロボティクス研究を推進し、人間とのかかわりを実現するための対人反応機能や、人間とのかかわりを通した運動学習機能に関する研究を進めてきました。これまで開発してきた各種のロボット・プラットフォームに加えて今回、M3-KindyとNobyが新たに開発されたことにより、より多様な相互作用に基づく認知発達研究が可能となりました。
これらの各種ロボット・プラットフォームを使い、人間の学習・発達原理を理解することで、人間らしい仕組みを取り入れ、コミュニケーション能力が発達するロボットの実現を目指します。
また、認知発達ロボティクスの研究が人間の認知発達メカニズムのより深い理解へとつながることが期待されます。
<参考図>
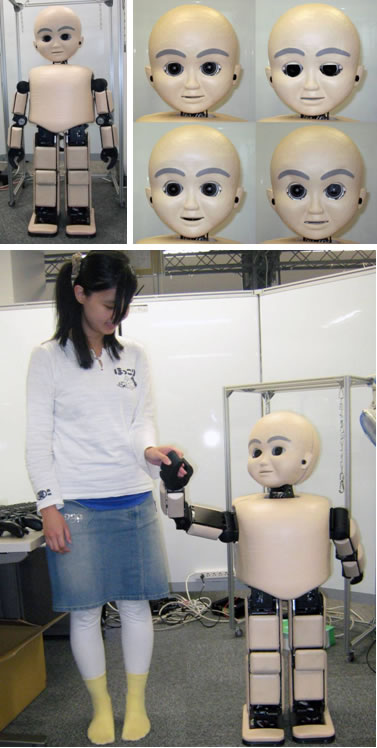
図1 開発した子ども型ロボット「M3-Kindy」
- 左上:自立するM3-Kindyの正面像。
- 右上:M3-Kindyのさまざまな表情。
- 下:人と手をつないで歩くM3-Kindy。

図2 開発した乳児型ロボット「Noby」
- 上段:子ども服を着せ、抱き上げ、寝かせ、ベビーカーに乗せた状態。実際の9ヵ月児と同じサイズであることを示す。
- 下段:さまざまな姿勢にした状態。関節の可動域が乳児並みに広く、乳児の多様な姿勢を模擬できることを示す。
<お問い合わせ先>
<研究に関すること>
浅田 稔(アサダ ミノル)
大阪大学 大学院工学研究科 教授
(科学技術振興機構 戦略的創造研究推進事業 ERATO型研究「浅田共創知能システムプロジェクト」 研究総括)
〒565-0871 大阪府吹田市山田丘2-1 大阪大学 大学院工学研究科 フロンティア研究棟1号館4階
Tel:06-6876-8884 Fax:06-6876-8994
E-mail:
<子ども型ロボットの詳細について>
石黒 浩(イシグロ ヒロシ)
大阪大学 大学院基礎工学研究科 教授
(科学技術振興機構 戦略的創造研究推進事業 ERATO型研究「浅田共創知能システムプロジェクト」 グループリーダー)
〒560-8531 大阪府豊中市待兼山町1番3号 基礎工棟D456号室
Tel & Fax 06-6850-6360
E-mail:
<乳児型ロボットの詳細について>
國吉 康夫(クニヨシ ヤスオ)
東京大学 大学院情報理工学系研究科 教授
(科学技術振興機構 戦略的創造研究推進事業 ERATO型研究「浅田共創知能システムプロジェクト」 グループリーダー)
〒113-8656 東京都文京区本郷7-3-1 東大工学部2号館
Tel:03-5841-6276 Fax:03-5841-1658
E-mail:
<JSTの事業に関すること>
小林 正(コバヤシ タダシ)
科学技術振興機構 イノベーション推進本部 研究プロジェクト推進部
〒102-0075 東京都千代田区三番町5 三番町ビル
Tel:03-3512-3528 Fax:03-3222-2068
E-mail: