ポイント
- 倒壊家屋内の捜索や調査を目的として、空気噴射ノズルを先端に搭載した空気浮上型能動スコープカメラを開発。段差踏破性能と操縦性能を飛躍的に向上。
- 空気噴射で浮上移動するヘビ型ロボットは世界初。
- ノズルの噴射方向を制御することにより安定した浮上と素早い方向転換を実現。
- 浮上により高い視点から見渡せるため、状況把握や要救助者発見がはるかに容易に。
内閣府 総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、東北大学の田所 諭(タドコロ サトシ) 教授、昆陽 雅司(コンヨウ マサシ) 准教授、多田隈 建二郎(タダクマ ケンジロウ) 准教授、安部 祐一(アンベ ユウイチ) 特任助教、八戸工業高等専門学校の圓山 重直(マルヤマ シゲナオ) 校長、国際レスキューシステム研究機構らのグループは、空気噴射によって瓦礫踏破能力を飛躍的に向上させた索状ロボット「空気浮上型能動スコープカメラ」(図)の開発に成功しました。従来の能動スコープカメラでは困難であった高い障害物やギャップの乗り越えが可能になると同時に、空気噴射浮上によって高い視点を得ることで、瓦礫内を広く見渡すことが可能となり、カメラ映像から瓦礫の内部状況が把握しやすくなりました。今後、これまで同プログラムで開発してきたさまざまな感覚機能を統合することによって、大規模地震や土砂崩れなどで被害を受けた建物内における被災者探索、災害調査の高度化が期待されます。

空気浮上型能動スコープカメラ
本成果は、以下の事業・研究プロジェクトによって得られました。
内閣府 革新的研究開発推進プログラム(ImPACT)
https://www.jst.go.jp/impact/
| プログラム・マネージャー |
田所 諭 |
| 研究開発プログラム |
タフ・ロボティクス・チャレンジ |
| 研究開発課題1 |
索状ロボット(細径)の研究開発 |
(研究開発責任者:田所 諭、 研究期間:平成26年度〜平成28年度)
(研究開発責任者:昆陽 雅司、研究期間:平成29年度〜平成30年度)
これらの研究開発課題では、極限環境下で高い能力を持つ索状(ヘビ型)ロボットの開発に取り組んでいます。
|
<田所 諭 ImPACT プログラム・マネージャーのコメント>
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
索状(ヘビ型)ロボット「能動スコープカメラ」は、これまで建設事故現場や福島原発の瓦礫内調査に活用されてきましたが、高い障害物や広いギャップがある場合の運動性能が不足しており、調査できる現場条件は限定的でした。空気噴射によりボディを浮上させることによって地面の状態に左右されず自在な移動を可能にする技術は、能動スコープカメラの運動性能を飛躍的に高めることができるため、ImPACT-TRCが目指している大きな非連続イノベーションを実現するコア技術になると期待されます。すなわち、プロジェクトが直接の対象としている災害時の瓦礫内はもとより、設備やインフラなどで不可能だった込み入った場所において、調査や検査などを可能にすると期待されます。浮上する索状ロボットはこれまで開発されておらず、本研究は困難な設計や制御の問題を解決することによってこれを実現したものであり、大変オリジナリティの高い成果です。今後、ImPACT-TRCで開発しつつある各種センシング技術、ヒューマンインタフェースなどと統合することによって、閉鎖空間内調査ロボットとしての総合性能を実現するとともに、厳しい現場での実用化を高めていきたいと考えています。
<研究の背景と経緯>
熊本地震や阪神淡路大震災に代表される大規模地震災害では、倒壊した建物内に取り残された人の発見と救助が大きな課題です。東北大学 田所教授、昆陽准教授を中心とするグループでは、狭い瓦礫内に進入して被災者を捜索することを目的として、索状(ヘビ型)ロボット「能動スコープカメラ」を開発してきました。このロボットはこれまで、建設現場倒壊事故、熊本大地震、福島第一原発1号機の瓦礫内調査(2017年3月30日東京電力発表)に使用されるなど、災害現場調査での実績を上げています。ImPACTタフ・ロボティクス・チャレンジでは、このロボットにさまざまな感覚機能を統合し、音声による被災者の発見などの課題に取り組んできました。
しかし、これまでの能動スコープカメラは、高い障害物や瓦礫を乗り越えることが難しく、捜索範囲を拡大するための大きな課題となっていました。また、散乱した瓦礫の中で被災者を発見し、位置を特定するには広い視野が必要です。
そこで、本研究グループでは、今まで瓦礫の中を這うことしかできなかったヘビ型ロボットに空気噴射による浮上機能を搭載し、瓦礫を飛び越えたり、飛び上がって広く見渡すことを可能にする技術に挑戦してきました。単純に空気を噴射するだけでは、柔軟な索状ロボットを安定して浮上させることは困難でしたが、今回、ノズル機構の改良や噴射方向の制御技術により課題の解決に至りました。
なお、ImPACTタフ・ロボティクス・チャレンジで研究開発を進めるレスキューロボットは、1995年の阪神淡路大震災を契機に田所教授らのグループが提唱し、世界の研究を牽引してきた研究分野であり、世界的に高く評価されています。田所教授はIEEE Fellow(米国電子技術協会IEEEの最高位メンバー資格)であるとともに、現在IEEE Robotics and Automation Societyの会長を務めています。
<研究の内容>
(1) 全体像
開発した能動スコープカメラは、太さ直径約50mm、全長約8m、重さ約3kgの柔軟な索状ロボットです。駆動機能は、①全身を覆う繊毛振動駆動アクチュエータ、②先端部の空気噴射浮上機構、の2つからなります。また、先端にはカメラが搭載され、狭隘環境の内部を確認することができます(図1)。
①の繊毛振動駆動アクチュエータは、能動スコープカメラの従来から提案してきた機構であり、表面を覆うナイロン製の繊毛を振動モータにより細かく振動させることで前方への推進力を得るものです。振動は内部に搭載した振動モータによって発生します。これにより、索状ロボットの柔軟性を損なわずに、狭隘部にロバストに侵入することが可能になります。
②の空気噴射浮上機構は今回新たに提案する機構で、噴射方向を制御する能動ノズルにより、浮上、推進、方向制御のための力を発生することができます。この機構を用いることにより、以下の3つの機能を実現することができます。
1. 段差乗り越え機能
能動スコープカメラは後ろ向きに空気を噴射し、噴射方向は鉛直下向き成分と後ろ方向の成分を持ちます。下向きに噴射することで先端が浮上し、先端が段差に乗り上がります。その後、後ろ向きの噴射方向の成分によって、索状体の先端に推進力を与えることができます。これは、先端が段差に乗り上がった後に後続部分を引っ張り上げるのに役立ち、段差踏破能力の向上に寄与します(図2)。
2. 方向制御機能
空気の噴射の方向を左右に切り替えることで、横方向の力を先端に加えて先端の方向を大きく変化させることができます。マッキベンアクチュエータなどで先端を屈曲させる従来の方法と比べると、素早く先端の方向を制御することができます(図3)。
3. 高い視点からの見渡し機能
先端が浮上して方向切り替えすることにより、先端のカメラであたりを見渡すことができます。この機能により、がれき内部の状況を把握しやすくなります。
これら3つの機能は瓦礫環境で要救助者を発見するためには大きな利点となり、災害時にロボットが探索できる範囲を広げることが期待されます。
(2) 新規開発技術
上記の機能を実現するためには、先端を持ち上げるのに十分な噴射力が出せ、かつ噴射方向を左右に変更できるノズルの開発が必要になります。また、噴射で持ち上げた先端は自律で安定に浮上し続けることが必要です。ここではその実現方法について説明します。
能動スコープカメラの先端にはノズルがつけられ、根元からコンプレッサを使って圧縮空気を送っています(図4)。ノズルは、流体力学に基づき、流路の抵抗を最小限に抑えるとともに、断面積を徐々に絞って圧縮空気を急激に噴射し、ノズル出口でより大きな噴射力が得られるように設計されています。本研究では、コンプレッサの性能やロボットのサイズなどの制約のもとで、最大限大きな噴射力が出せる流路とノズルを設計しました。この結果、2N程度の力が出せるようになり、先端の浮上に十分な力が出せるようになりました。
次に、噴射方向を左右に変えるためには、ノズルの出口方向を変える必要があります。本ロボットでは、ノズルをロボットの長軸回りに回転させることで噴射方向の制御を実現しました。この機構により、ロボットは左右に空気の噴射方向を変えることができ、浮上して首を左右に振ることができるようになりました。
最後に、先端を安定に浮上させるためには姿勢に応じて噴射方向の制御を行う必要があります。例えば、先端の空気の噴射方向をロボットに対して固定してしまうと、噴射力の増大とともに先端が後ろ向きに反り返ります。そこで、ロボットの先端を安定に浮上させるために、空気の噴射方向を重力方向に対して一定方向にする機構を考案し、数理モデルによってその妥当性を確認しました(図5)。結果、能動スコープカメラは先端を安定に浮上させたまま進むことが可能になりました。
これらの要素技術を組み合わせた結果、能動スコープカメラの先端は高さ20cm程度まで安定に浮上し続けることができるようになりました(図6)。空気噴射で空中に浮上して進行する索状(ヘビ型)ロボットの実現は、世界初の成果となります。
(3) 駆動性能について
空気噴射による先端浮上を用いることで、従来の能動スコープカメラに比べて、段差走破能力と方向切り替え能力が大幅に向上しました。段差踏破能力について試験を行い、後ろから力を加えることなしに最大20cmの段差を乗り越えられることが分かりました。方向切り替え機能に関しても先端方向を90度変化させる実験を行い、従来は方向切り替えに26秒かかっていたものが、空気噴射を用いることで1.6秒と1/15倍近くに短縮されました。
また、本ロボットで瓦礫環境においても走破試験を行い、先端を浮上させることによって瓦礫を乗り越えて進行することができることが示されました(図7、図8)。これらの結果から、実際の災害現場におけるロボットの探索可能範囲が広がり、かつ探索時間が減ることが期待されます。
(4) 操縦性能について
先端を浮上させて方向を切り替えることにより、先端のカメラであたりを見渡すことができます。図9は同じ環境で先端が浮いている場合と浮いていない場合の先端カメラの映像を比較したものです。この機能により、がれき内部の状況を把握しやすくなりました。本結果により、災害時の要救助者の発見が容易になり、かつ操縦を容易にすることが期待されます。
<今後の展開>
空気浮上型能動スコープカメラは高い瓦礫踏破性能を発揮できることから、今後、災害模擬フィールドでの試験を繰り返し、ロボットの耐久性向上や操縦システムの統合化など、災害救助システムとしての実用化を進めていきます。また、より移動可能な領域を増やし、かつ移動時間の削減を目指します。将来は環境情報を元に空気噴射を制御し、より複雑な段差を素早く踏破することを目指します。
<参考図>

図1 空気浮上型能動スコープカメラ
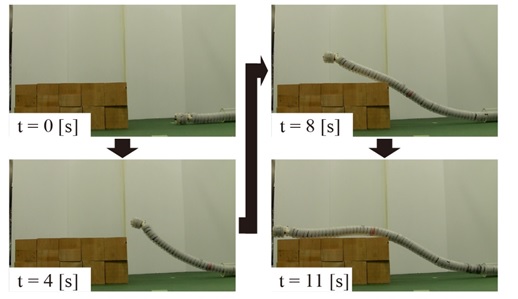
図2 先端浮上による段差乗り越えの様子
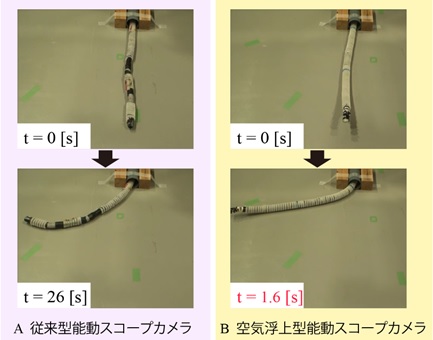
図3 噴射方向切り替えによる方向切り替え
図4 システム全体
コンプレッサより空気が送られ先端のノズルで噴射される
図5 噴射方向を重力方向に対し一定にする様子

図6 先端浮上の様子
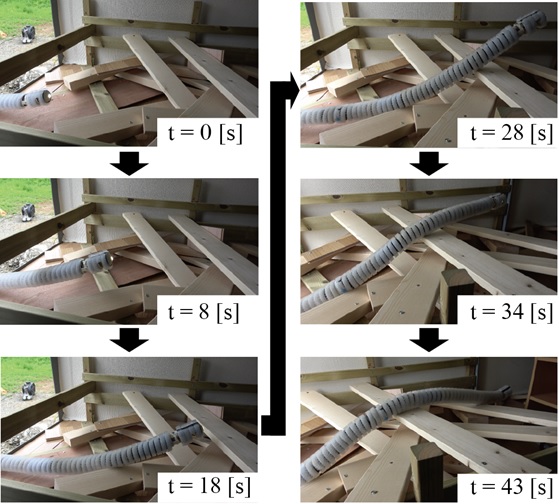
図7 木片瓦礫環境を乗り越える様子
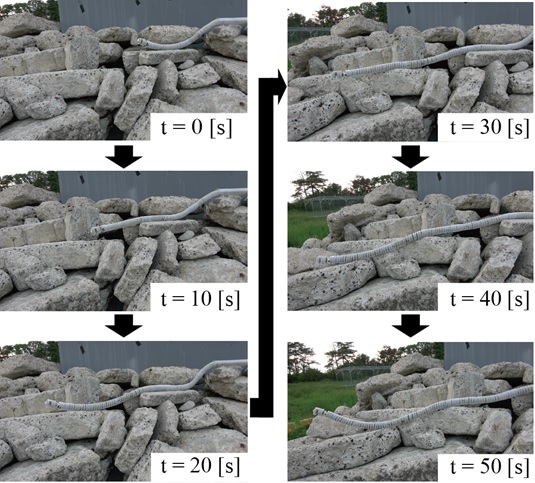
図8 コンクリート瓦礫を浮上して進む様子
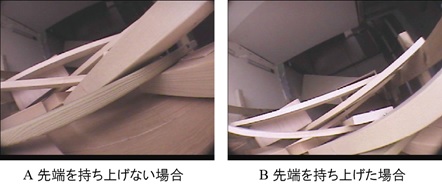
図9 先端が浮いている場合(右)と浮いていない場合(左)のカメラ画像の比較
<お問い合わせ先>
<研究に関すること>
田所 諭(タドコロ サトシ)
東北大学 大学院情報科学研究科 教授
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel: 022-795-7022
E-mail:
昆陽 雅司(コンヨウ マサシ)
東北大学 大学院情報科学研究科 応用情報科学専攻 准教授
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel: 022-795-7025
E-mail:
多田隈 建二郎(タダクマ ケンジロウ)
東北大学 大学院情報科学研究科 応用情報科学専攻 准教授
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel: 022-795-7025
E-mail:
安部 祐一(アンベ ユウイチ)
東北大学 大学院情報科学研究科 応用情報科学専攻 特任助教
〒980-8579 宮城県仙台市青葉区荒巻字6-6-1 工学部機械知能系共同棟4階
Tel: 022-795-7025
E-mail:
圓山 重直(マルヤマ シゲナオ)
国立高等専門学校機構 八戸工業高等専門学校 校長
〒039-1192 青森県八戸市田面木字上野平16-1
Tel: 0178-27-7220
E-mail:
<ImPACTの事業に関すること>
内閣府 革新的研究開発推進プログラム担当室
〒100-8914 東京都千代田区永田町1-6-1
Tel: 03-6257-1339
<ImPACTプログラム内容およびPMに関すること>
科学技術振興機構 革新的研究開発推進室
〒102-0076 東京都千代田区五番町7 K’s五番町
Tel: 03-6380-9012 Fax: 03-6380-8263
E-mail:
<報道担当>
東北大学 大学院情報科学研究科 総務係
〒980-8579 仙台市青葉区荒巻字青葉6-3-9
Tel: 022-795-5813 Fax: 022-795-5815
E-mail:
科学技術振興機構 広報課
〒102-8666 東京都千代田区四番町5番地3
Tel:03-5214-8404 Fax:03-5214-8432
E-mail: