ポイント
- 小さな袋に入った液体をヒーターで気化させ、体積変化を起こすことで駆動力を生じるモーターを開発しました。
- モーター本体をプラスチックフィルムで作製し、導電インクを用いて印刷した薄く柔軟なヒーターおよびセンサーを組み合わせることで、構成部品がすべてやわらかいモーターを実現しました。
- やわらかく薄い特徴を生かし、ソフトロボットのアクチュエーターとしての応用が期待されます。
ロボットの関節を曲げ伸ばしする駆動源といえば、金属材料や永久磁石を使った硬くて重くかさばる電気モーターが主流でした。やわらかく安全なロボットを目指し、空気でゴム材料を膨張させて駆動力を得る空気圧式モーターが提案されていますが、それを電気制御するためには、ポンプやバルブが別途必要でした。
東京大学 大学院情報理工学系研究科の川原 圭博 准教授と新山 龍馬 講師らの研究グループは、印刷エレクトロニクス技術注1)を用いることで、薄くやわらかく軽量なモーターを作製することに成功しました。低い温度で沸騰する液体が入ったプラスチックフィルムの袋を、導電インク技術を用いて印刷したヒーターで加熱することにより、袋の内部で液体が気化・膨張し、モーターの駆動力を得る仕組みです。自然冷却によってモーターは繰り返し動作することができます。また、ヒーターだけでなく、配線やタッチセンサー、アンテナなども合わせて印刷し、モーターと一体化することができます。
ロボットの関節を模した駆動実験では、開発した大きさ80mm×25mmのモーターで、モーター本体の重量は約3gと非常に軽量でありながら、最大約0.1N・mの回転力を発生させることができました。また、最大動作角度は90度に達しました。やわらかく薄い特徴を生かし、ソフトロボットのアクチュエーター注2)としての応用が期待されます。
なお、本研究の詳細は、シンガポールで開催されるロボットとオートメーションに関する国際会議にて現地時間2017年5月30日に発表します。
本成果は、以下の事業・研究プロジェクトによって得られました。
科学技術振興機構(JST) 戦略的創造研究推進事業
| 研究プロジェクト |
ERATO川原万有情報網プロジェクト |
| 研究総括 |
川原 圭博(東京大学 大学院情報理工学系研究科 准教授) |
| 研究期間 |
平成27年10月~平成33年3月 |
上記研究プロジェクトでは、センサーネットワークやIoT機器がより自律的で能動的な人工物として作用し、自然物と共生して新しい価値を生むための万有情報網の構築を目指します。センサーやロボットを低コストで迅速に作ることを可能とするファブリケーション技術の研究開発のほか、IoT機器のサステイナブルな動作の実現のためのエネルギーハーベスティング(環境発電)や無線給電技術の開発に取り組みます。
<発表内容>
やわらかなボディを持つロボットは「ソフトロボット」と呼ばれ、従来の硬いボディを持つロボットに比べると力は弱いものの、生物に似た動きや、人にぶつかった場合の安全性などが注目され、近年急速に研究が進展しています。その未来像は、ディズニー長編アニメーションに登場する「ベイマックス」注3)のように、人間と共存する安全でやさしいロボットです。
これまでにも、硬い構造材料をやわらかい材料で置き換えたソフトロボット向けのパーツが多く提案されてきましたが、ロボットの関節を曲げ伸ばしする駆動源には、金属材料や永久磁石を使った硬くて重い電気モーターを使うか空気ポンプを用いる必要があり、ソフトロボット自体の小型・軽量化には多くの課題が残されていました。
今回提案したモーターは、小さな袋に低い温度で沸騰する有機溶剤であるアセトンや3MTMNovecTM7000注4)などの液体を封入したものです。この液体を印刷技術により作製したヒーターによって加熱することで気化させ、モーターの駆動源としたことに新規性があります。ヒーターへの加熱を止めると気体は再び液体に変化し、モーターは元の形に戻ります。ヒーターへの加熱を電子的に制御することでその動作をすることが可能になります(図1)。ヒーターはインクジェットプリンターを用いて厚さ135μmのPETフィルムに銀ナノインクを用いて印刷します。銀ナノインクを用いてヒーターを印刷することで、ヒーターへの配線やタッチセンサーも一括して造形することが可能です。
作製したモーターは、大きさ80mm×25mm、重量が約3gと非常に軽量でありながら、実験では最大約0.1N・mの回転力(小指程度の曲げ力に相当)を発生させることができました。また、最大動作角度は90度に達しました。
提案するモーターの作製は大きく2つのプロセスに分かれます(図2)。まず、ヒーターとして利用される銀ナノインク回路を市販のインクジェットプリンターで印刷します。その際、所望の形状と発熱能力に合わせたヒーターのパターンを自動生成することができます。次にプラスチックフィルムの袋を作製します。この時、2枚重ねのフィルムをコンピューター制御で熱融着することによって自由な形状を実現します。その後、袋への液体の封入や接着などを行って完成です。A4サイズ程度のモーターの作製には、数万円以下の安価な装置と数十分程度の作業時間しか必要ないため、工業用途だけでなく家庭や学校教育現場など様々なシーンでの活用が期待されます。
上記の提案手法により、虫(図3)や植物(図4)などの生体を模倣したソフトロボットを試作しました。また、折り紙ロボットへの応用例として、紙のような形状から立体的に自動で組み上がる箱を作製しました(図5)。今後は、加熱方式を工夫することにより、モーターの動作速度や出力を向上する研究に取り組んでいきます。
<参考図>
図1 印刷エレクトロニクス技術を用いることで実現した薄くやわらかく軽量なモーターの原理の図
図2 印刷技術を用いたモーターの作製プロセス
図3 昆虫の軽量かつやわらかな動作を再現するソフトロボットの応用例を示す蝶々を模した例
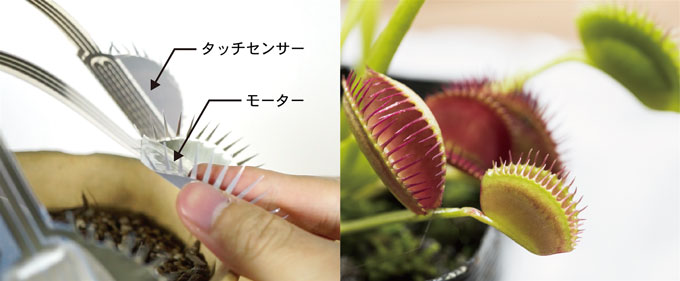
図4 植物のやわらかさを持つソフトロボットの応用可能性を示すタッチセンサーとモーターの一体化によって実現したハエトリソウを模した例
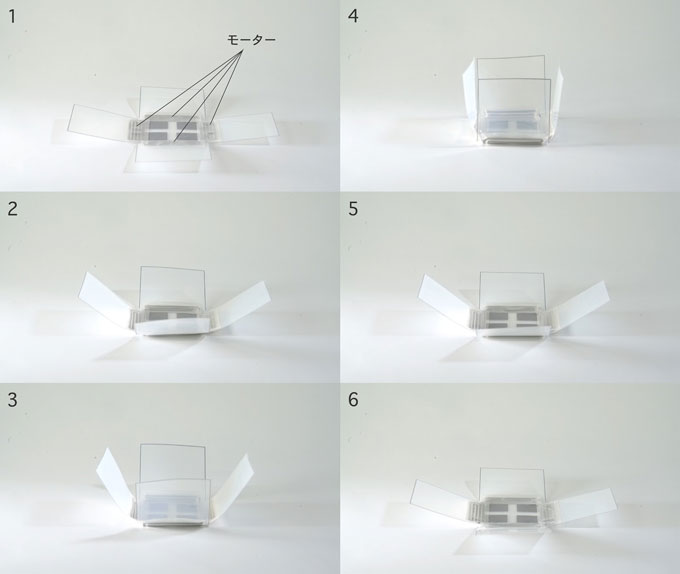
図5 折り紙ロボットへの応用可能性を示す紙のような形状から立体的に自動で組み上がる箱の例
<用語解説>
- 注1) 印刷エレクトロニクス技術
- 印刷技術を活用し、電子回路やセンサーなどを製造する技術。
- 注2) アクチュエーター
- エネルギーを動力源として物理的な運動に変換させる装置。モーターやエンジンなどが該当。
- 注3) ベイマックス
- 2014年アメリカのウォルト・ディズニー・スタジオ製作の長編アニメーション映画。ふわふわした風船のようなやわらかなボディを持つ看護ロボットの「ベイマックス」と主人公の少年の心の交流が描かれている。
- 注4) 3MTMNovecTM7000
- 化学的に不活性な低沸点液体。広く普及している有機溶剤であるアセトンのほか、人体や環境への影響を考え、3MTMNovecTM7000も利用した。
<発表学会>
本研究の詳細は、シンガポールで開催されるロボットとオートメーションに関する下記の国際会議にて現地時間2017年5月30日に発表します。
| 学会名 |
IEEE International Conference on Robotics and Automation (ICRA) 2017 |
| 発表テーマ |
“Electric Phase-change Actuator with Inkjet Printed Flexible Circuit for Printable and Integrated Robot Prototyping” |
| 発表者 |
| 川原 圭博 |
(東京大学 大学院情報理工学系研究科 電子情報学専攻 准教授、
科学技術振興機構(JST) ERATO川原万有情報網プロジェクト 研究総括) |
| 新山 龍馬 |
(東京大学 大学院情報理工学系研究科 知能機械情報学専攻 講師) |
| 鳴海 紘也 |
(東京大学 大学院情報理工学系研究科 電子情報学専攻 博士課程1年) |
| 中原 健一 |
(東京大学 大学院情報理工学系研究科 電子情報学専攻 修士課程1年) |
|
なお、実験動画を下記URLにて公開します。
https://youtu.be/5Vq4rZQpbEw
<お問い合わせ先>
<研究に関すること>
川原 圭博(カワハラ ヨシヒロ)
東京大学 大学院情報理工学系研究科 准教授
ERATO川原万有情報網プロジェクト 研究総括
Tel:070-4038-4478
E-mail:
<JST事業に関すること>
大山 健志(オオヤマ タケシ)
科学技術振興機構 研究プロジェクト推進部
Tel:03-3512-3528
E-mail:
<報道担当>
科学技術振興機構 広報課
Tel:03-5214-8404
E-mail: