ポイント
- プラント巡回点検を目的として、狭所進入性能と障害物乗り越え性能を両立したヘビ型ロボットを開発。
- 胴体の「細さ」を生かして狭路の移動、胴体の「長さ」を生かして高さ最大1mの段差登りを実現。
- センサを胴体各所の底部に搭載し、取得した情報を生かして階段昇降を実現。
内閣府総合科学技術・イノベーション会議が主導する革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジ(プログラム・マネージャー:田所 諭)の一環として、電気通信大学 大学院情報理工学研究科 田中 基康(タナカ モトヤス) 准教授、金沢大学 理工研究域機械工学系 鈴木 陽介(スズキ ヨウスケ) 助教らは、プラント内の巡回点検を目的としたヘビ型ロボット「T2 Snake-3」を開発しました。車輪部を関節で直列に連結したロボットで、17個の関節用モータと10個の車輪用モータが搭載されており、全長1730mm、重さは約9kgです。搭載したバッテリにより、先頭と最後尾に取り付けたカメラの映像を見ながら無線遠隔操縦で約1時間動作することができます。胴体の「細さ」を生かして狭路を移動できるほか、胴体の「長さ」を生かして障害物を越えることができ、最大で高さ1mの段差を登ることができます。さらに、周囲環境までの距離や傾きを計測できるセンサが各胴体底部に搭載されており、その情報を用いて階段を巧みに登り降りすることができます。開発したロボットは、将来的にはプラント内の巡回点検、家屋内やインフラの点検といった産業への展開が期待されます。
本成果は、以下の事業・研究プロジェクトによって得られました。
内閣府 革新的研究開発推進プログラム(ImPACT) https://www.jst.go.jp/impact/
| プログラム・マネージャー |
田所 諭 |
| 研究開発プログラム |
タフ・ロボティクス・チャレンジ |
| 研究開発課題 |
タフな車輪型索状ロボットの開発と制御 |
| 研究開発機関 |
電気通信大学 |
| 研究開発責任者 |
田中 基康 |
| 研究期間 |
平成28年度〜平成30年度 |
本研究開発課題では、タフな車輪型索状ロボットとそれに伴う制御技術の開発に取り組んでいます。
| 研究開発課題 |
索状ロボットの全周に実装可能な皮膚型触・近接覚センサの開発 |
| 研究開発機関 |
金沢大学 |
| 研究開発責任者 |
鈴木 陽介 |
| 研究期間 |
平成27年度〜平成30年度 |
本研究開発課題では、タフな状況でのロボット操作をサポートするセンサ技術の開発に取り組んでいます。
|
<田所 諭 プログラム・マネージャーのコメント>
ImPACTタフ・ロボティクス・チャレンジは、災害の予防・緊急対応・復旧、人命救助、人道貢献のためのロボットに必要不可欠な、「タフで、へこたれない」さまざまな技術を創りだし、防災における社会的イノベーションとともに、新事業創出による産業的イノベーションを興すことを目的とし、プロジェクト研究開発を推進しています。
プラントの巡回点検は事故を防止するため、また、災害発生時に被害が大きくならないために重要であり、ロボットによる遠隔自動化が期待されている分野の1つです。プラントには狭い場所や急な階段が多く、設置された配管や障害物によってロボットの通行が困難な場所が数多く存在します。高い場所や入り組んだ場所をのぞき込んで点検することが必要な箇所もあります。本研究開発は、車輪を多数使った索状ロボットを構成することによって、このような困難な場所を安定して走行することを可能にしたもので、従来のクローラや車輪型のロボットでは不可能だった点検現場のロボット化を可能にすると考えられます。今後、点検のためのシステム化、耐久性能向上、現場での試験などを経て、現場への配備が進むと期待されます。
<研究の背景と経緯>
私たちの身の回りでは、地震や土砂崩れ、インフラ老朽化に伴う崩落事故といった災害が発生しています。災害への対策は、人命救助や応急工事など緊急時の対応、緊急工事や物資運搬といった復旧時の対応が主に注目されます。しかし、災害を未然に防ぐため、あるいは被害を小さく抑えるためには、緊急時や復旧時の対応だけではなく、平常時における点検、補強、修繕といった「予防・減災」も大切です。ImPACTタフ・ロボティクス・チャレンジでは災害直後や復旧時に活躍する災害対応ロボットだけでなく、平常時の「災害予防」を目的としたロボットの研究開発が行われています。本研究グループでは、平常時におけるプラント内の巡回点検を目的とした災害予防ロボットの研究開発に取り組んでいます。
プラントは狭く入り組んだ構造をしています。そのため、点検時には狭い通路や勾配の急な階段を通り、時には配管の上をまたぐ、配管の下をくぐる、といった動作をしながら移動する必要があります。さらに、人による点検を代替えするためには、ロボットにとっては非常に高い位置にある装置や計器類にアクセスし、作業を行わなければなりません。これらは、一般的な車輪型ロボットやクローラ型ロボットにとってたいへん困難な課題でした。
以上の課題を解決するため、本研究グループではヘビのように細長いヘビ型ロボットの開発を行いました。多数の関節で連結された細長いヘビのような構造のロボットで、関節動作によって形状を自在に変化できます。この「細長い」構造は、狭所への進入と障害物の乗り越え、高い位置での視認や作業において有利な特徴であると言えます。
<研究の内容>
プラントの巡回点検を目的としたヘビ型ロボット「T2 Snake-3」(図1)を開発しました。ハードウェア、センサ、動作、操作におけるそれぞれの特徴を説明します。
(1)ハードウェア
ロボットは車輪を搭載したリンクを関節で直列に連結した構造で、17個の関節用モータと10個の車輪用モータが搭載されており、全長1730mm、重さは約9kgです。カメラとバッテリが搭載されており、カメラの映像を見ながら無線遠隔操縦で約1時間動作することができます。従来、バッテリを搭載しつつ動作時間を確保するためにはロボットが大型化してしまう問題がありました。今回、1対の車輪のうち、片側のみをモータ駆動輪、もう片側を空回りする受動輪とし、受動輪の内側にバッテリを配置することで、全身に小型のバッテリを分散的に配置するができ、ロボットの小型化と1時間の動作時間を実現しました。また、ロボットを制御するための小型パソコンが最後尾に1台、カメラ映像を送信するための超小型パソコンが先頭と最後尾に計2台、そして後述するセンサの情報を取得するためのマイコン(マイクロコントローラ)が全身に多数、それぞれ搭載されています。
(2)センサ
ロボットは先頭から最後尾まで非常に多くの車輪で周囲環境と接触します。周囲環境に対して車輪が適切に接触していなければ、効率よく推進力を発生することができません。不適切な接触状態となって胴体が障害物に引っかかると、動作不能に陥ることもあります。そこで、金沢大学 鈴木助教が新たに開発した近接覚センサ(図2)を搭載しました。このセンサは、複数配置された赤外光反射型フォトセンサの出力をアナログ演算回路で統合することにより、周囲環境までの距離や傾きを非接触で計測でき、高速応答かつ省配線という特徴があります。フォトセンサの配置方法・駆動電圧・アンプ回路・配線方法は、ロボットに合わせて設計されています。近接覚センサが先頭から最後尾までの胴体底部に分散的に配置されており、全車輪の接地状態や地面との傾きを検出することができます。検出した情報は後述する動作制御に利用されます。
(3)動作
ロボットがプラント巡回点検を行うためには、狭所の移動、配管またぎ、配管くぐり、階段昇降といった「移動」を行う能力と、機器類の操作、操作盤の操作、コック開閉、視認といった「作業」を行う能力が必要となります。移動および作業の能力に関係するロボットの動作について、以下で説明します。
このロボットは、胴体の「細さ」を生かして高さ120mm×幅250mmの狭路を移動できます(図3)。人間が1人通れるような横幅500mmの狭い通路であっても、このロボットであれば2台ですれ違うことができます。ロボットの最大高さは地面から120mmと非常に低いため、上方にせり出した配管などの障害物をくぐる動作については、特別な動作を行うことなく実現できます。また、胴体の「長さ」を生かして障害物を乗り越えることができ、最大で高さ1mの段差を登ることができます(図4)。よって、地面の近くに設置されている配管をまたぐこともできます。このように、プラントにおいて必要となる狭路の移動、配管またぎ、配管くぐりが可能です。また、胴体底部に搭載された近接覚センサの情報を利用し、階段を巧みに登り降りすることができます(図5)。通常、階段はヘビ型ロボットにとって移動が難しい環境です。段差が連続して存在する階段環境では、ロボットの連結部分と各段差の縁との接触が頻発し、連結部分が段差に引っかかり動作不能になってしまうからです。これに対し、このロボットは搭載された近接覚センサにより車輪の接地状態を検出し、適切なタイミングで関節を動かすことが可能です。これにより、連結部分が段差に引っかかることなく着実に階段を登り降りすることを実現しました。このロボットの階段昇降方法は1段ずつ着実に登り降りを行うため、傾斜が急な階段に対しても適用することができます。現在のロボットではロボット自体の大きさの問題があるため実際の急階段には対応できませんが、制御アルゴリズムにおいてロボットのパラメータと登れる階段の高さ/奥行きの条件が明確化されているので、ロボットのハードウェアを改良することで今後対応できると考えています。
また、ロボットの先頭を持ち上げてロボットアームのように動作することもできます(図6)。先頭部にロボットハンドを搭載することで、操作盤の操作や小物体拾いといったプラント点検で行われる軽作業が可能になると見込まれます。さらに、壁に寄りかかることで先頭部を大きく持ち上げることができ、地面から高い位置の計器を見ることや障害物の向こう側をのぞき込むことが可能となるため、点検時における視認への活用が期待できます(図7)。
以上のように、このロボットはプラント巡回点検で必要な移動および作業に関するさまざまな動作を実現することができます。
(4)操作
ロボットは無線遠隔操縦型であるため、操作者が先頭と最後尾に搭載されたカメラ映像を見ながら操縦を行います。操縦は簡易な操作用コントローラ(ゲームパッド)を用いて行われ、比較的簡単な操作で前述の動作を行うことができます。このロボットでは関節や車輪に非常に多くのモータが搭載されているため、操縦者が個々のモータを個別に操作することは現実的ではありません。そこで今回、さまざまな制御式やセンサ情報を駆使して関節や車輪の動作を計算するアルゴリズムを開発し、比較的簡単な操作で前述のロボットの動作を実現しました。操縦者は基本的にロボット先頭の動きだけを指示します。そして開発したアルゴリズムに従い、ロボットが自ら、指示された先頭の動きに追随して最後尾までの胴体の動きを生成し実行します。その結果、操作者の負担は大きく軽減され、簡単な操作を実現しました。これにより、操作者の育成にかかる時間が短縮され、現場への導入がスムーズに行えると考えられます。
<今後の展開>
プラント点検では、ロボットは「移動」だけでなく配電盤ボックスの開け閉めといった「作業」を行うことになります。また、それらの移動や作業ができるだけ簡単な操作で実現されることが望ましいと言えます。今後も「移動」、「作業」、「操作」、の3つのアプローチで研究開発を進めていきます。
「移動」については、プラントにおいて移動可能な場所を増やします。例えば、現在は直線状にしか階段を昇降できませんが、今後はらせん階段の昇降の実現を目指します。また、ロボットに何らかの故障が生じたときにも動作を継続するための故障時制御方法についても検討を行っています。「作業」については、ImPACTタフ・ロボティクス・チャレンジ内で開発されているロボットハンドとの統合を行い、移動能力だけでなく作業能力も備えたヘビ型ロボットの実現を目指します。「操作」については、より簡単にロボットの操作が行えるような操作インタフェースや動作制御の実現を目指します。例えば、高い段差を昇降する際には、関節負荷軽減のために壁に接触しながら頭を持ち上げていくことになりますが、その操作には操縦技術の熟練を必要とします。操作者が容易に操作できるように、搭載された近接覚センサ情報を積極的に用いてロボットが自律的に環境に適応するような制御方法についても検討していく予定です。
以上の研究開発を進めるとともに、ロボットの耐久性向上や点検のシステム化など、実プラントへの適用を目指した検討にも取り組んでいきます。
<参考図>
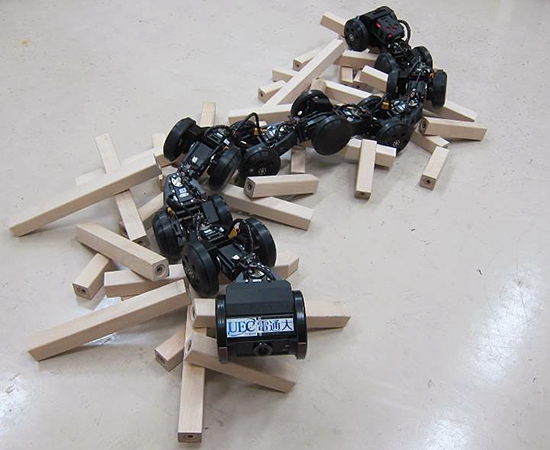
図1 ヘビ型ロボット「T2 Snake-3」
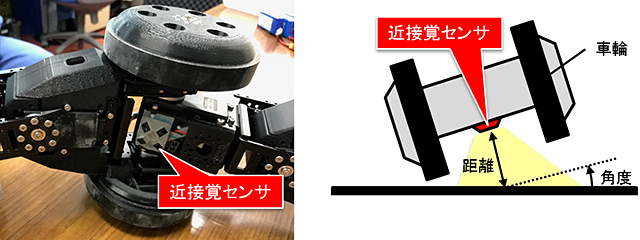
図2 近接覚センサ

図3 幅250mmのL字狭路の通過

図4 高さ1mの段差登り

図5 階段登り
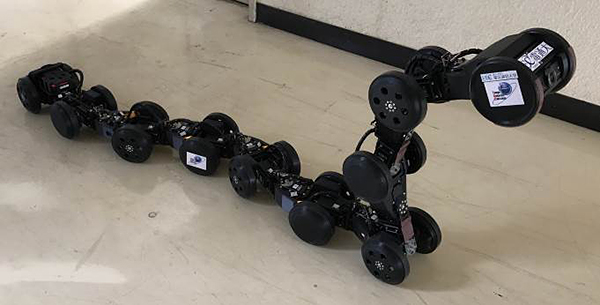
図6 先頭を持ち上げた動作

図7 壁を使って先頭を高く持ち上げる
<お問い合わせ先>
<研究に関すること>
田中 基康(タナカ モトヤス)
電気通信大学 大学院情報理工学研究科 機械知能システム学専攻 准教授
〒182-8585 東京都調布市調布ヶ丘1-5-1 東4号館4階402室
Tel:042-443-5430 Fax:042-443-5430
E-mail:
鈴木 陽介(スズキ ヨウスケ)
金沢大学 理工研究域機械工学系 助教
〒920-1192 石川県金沢市角間町 自然科学3号館7F 3B716室
Tel:076-234-4696
E-mail:
<ImPACT事業に関すること>
内閣府 革新的研究開発推進プログラム担当室
〒100-8914 東京都千代田区永田町1-6-1
Tel:03-6257-1339
<ImPACTプログラム内容およびPMに関すること>
科学技術振興機構 革新的研究開発推進室
〒102-0076 東京都千代田区五番町7 K’s五番町
Tel:03-6380-9012 Fax:03-6380-8263
E-mail:
<報道担当>
電気通信大学 総務課広報係
〒182-8585東京都調布市調布ヶ丘1-5-1
Tel:042-443-5019 Fax:042-443-5019
E-mail:
金沢大学 総務部広報室
〒920-1192 金沢市角間町
Tel:076-264-5024 Fax:076-234-4015
E-mail:
科学技術振興機構 広報課
〒102-8666 東京都千代田区四番町5番地3
Tel:03-5214-8404 Fax:03-5214-8432
E-mail: