ポイント
- コウモリは飛びながら小さな昆虫を次々と捕食するが、その際の超音波によるセンシングと飛行ルートの関係はこれまで明らかではなかった。
- コウモリが複数の獲物に注意を分散させ、またそれらを高確率で捕らえる飛行ルートを選択していることを発見した。
- ナビゲーション研究における軌道計画法や選択的注意機構に関する研究分野においてコウモリが新しいモデル動物として有用であることが示された。将来的には高機能の飛行ドローンなど自律移動ロボット分野などへの工学応用が期待される。
同志社大学 研究開発推進機構の藤岡 慧明 博士は、同生命医科学部の飛龍 志津子 准教授(兼・さきがけ研究員)、東京大学 生産技術研究所の合原 一幸 教授らとともに、採餌のためにナビゲーション飛行するコウモリが、目前の獲物のみならず、その先にいる次の獲物の位置までも超音波で先読みすることで、より多くの獲物を確実に捕らえる飛行ルートを選択していることを発見しました。
日本でも広く見られるアブラコウモリは高度に発達した超音波ソナー注1)の能力を有しており、体長数ミリメートルの蚊などの微小な飛翔昆虫を正確に探知・定位し、飛びながら次々と捕食を行っています。しかしながら、このような高度な採餌行動を可能とするソナーの情報と飛行ルートとの関係については、これまで明らかにされていませんでした。
本研究グループは、野生コウモリのナビゲーション行動を大規模なマイクロホンアレイ注2)を用いて計測し、その行動原理を数理モデリングによって解析しました。その結果、野生のコウモリが目前の獲物だけでなく、その次の獲物に対しても注意を分散させ、高確率で複数の獲物を連続的に捕らえることが可能な飛行ルートを選択していることを明らかにしました。
この発見により、コウモリが軌道計画注3)や選択的注意注4)研究に関する新しいモデル動物となることが示されました。このようなコウモリのナビゲーションアルゴリズムからはアクティブセンシング注5)を行う自律移動ロボットなどへの応用研究も期待できます。
本研究は、日本学術振興会 科学研究費助成事業、JST 戦略的創造研究推進事業 個人型研究(さきがけ)の研究課題「コウモリの生物ソナー機構に学ぶ、ロバストな実時間空間センシング技術の創出」(研究者:飛龍 志津子)、内閣府 最先端研究開発支援プログラム(FIRST)などの一環として行ったものです。
本研究成果は、2016年4月11日(米国東部時間)の週に米国科学アカデミー紀要(PNAS)のオンライン速報版で公開されます。
<研究の背景と経緯>
コウモリは超音波を放射し、その反響音を聴取・分析することで獲物を正確に探知・定位し、飛行しながら捕食行動を行っています。このような高度に発達した生物ソナー機構を解明するために、これまでの多くの研究では、単一の獲物を捕らえる際のコウモリの音声の分析などが行われてきました。一方で、食虫性コウモリは一晩に数百匹もの獲物を捕食すると言われており、近年の研究からは、獲物の捕食を短い時間間隔(短いときには1秒未満)で次々と繰り返していることが分かってきました。そこで本共同研究グループは、コウモリが特定のターゲットだけではなく複数のターゲットに注意を分散させることで、連続的に捕食を行うのに効率的な軌道を計画していると考え、音響計測と数理モデリングを用いたナビゲーション行動の分析によって検証を試みました。
<研究の内容>
上述の仮説を検証するために、コウモリが2匹の獲物の位置情報に基づいて飛行方向を調整していると仮定して(図1)、飛行ルートに関する数理モデルを構築しました。この数理モデルを用いることで、コウモリが目前の獲物だけでなくその次の獲物を意識して軌道を変化させているかどうかについて、2匹の獲物に対する“飛行制御に関する選択的注意”をパラメータとして分析することができます。数値シミュレーションの結果、コウモリの飛行の選択的注意が双方の獲物に対して分散する場合に、最も高確率で双方の獲物を捕食できる飛行ルートとなることが分かりました。
また、野外にて大規模マイクロホンアレイシステムを用いて、野生コウモリの3次元飛行軌跡と超音波の放射方向を計測しました(図2)。この結果、実際にコウモリが連続して捕食を行う際にはソナーの選択的注意(超音波の放射方向であり、ヒトの視線に相当)を目前の獲物だけでなく、その次の獲物にも向けていることが分かりました(図2C)。
そして、計測したコウモリの飛行軌跡から飛行の選択的注意を、上述の数理モデルを用いてパラメータ推定した結果、長い時間間隔で2匹の獲物を捕食した際の飛行軌跡は、ほぼ直近の獲物(獲物1)に対する選択的注意にのみ基づき軌道が計画されていることが分かりました(図3A)。一方で、短い時間間隔で2匹の獲物を捕食した際には、コウモリが目前の獲物だけでなく次の獲物にも飛行中の注意を分散させていること、また選択的注意の分散の割合は数値シミュレーションにおける最適値とほぼ一致することが分かりました(図3C)。これらの結果から、コウモリは短い時間間隔で獲物を捕食する際には複数の獲物に対して注意を分散させ、高確率でそれらの獲物を捕食できる飛行ルートを選択していたことが分かりました。
<今後の展開>
本研究によって、コウモリが複数の標的に対して、音響と飛行中の選択的注意をダイナミックに制御していることが明らかとなり、コウモリのナビゲーション研究が、分散する複数の標的に効率よく注意を向ける機構(選択的注意機構)を解明する新しいモデルとなることが期待されます。また動物の注意方向や意思判断を読み解く数理モデリングは、音響センシングと移動の高度な協調行動から実現されるコウモリのナビゲーション行動を解明する有用な手段であることが示されました。
今後、アクティブセンシングによって検知した複数の標的を効率的に捕捉するための軌道計画や、本研究で構築した数理モデルをさらに発展させることによる高機能の飛行ドローンなど自律移動を要するロボット技術分野などへの応用も期待されます。
<参考図>
図1 コウモリの数理モデルを構築するための枠組み
コウモリが目前の獲物(獲物1)とその次の獲物(獲物2)の位置情報(θbp1,φbp2など)を利用して自身の飛行方向(θbとφb)を変化させていると仮定した。φは水平面における角度、θは垂直面における角度をそれぞれ示している。
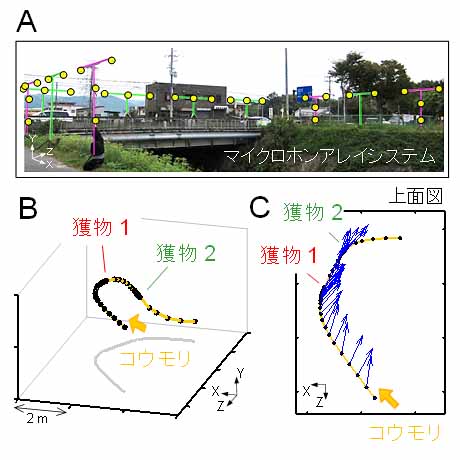
図2 マイクロホンアレイシステムを用いた野生コウモリの3次元動態音響計測
川の上空で採餌飛行するコウモリの音声を32個のマイクロホンで構成されたマイクロホンアレイシステムで録音した(A)。4基のY字型アレイユニット(図中桃色のユニット)を用いて、コウモリの放射超音波の到達時間差を利用することで、3次元飛行軌跡を構築できる(B)。また、同じ高さに並んだマイクロホンで録音したソナー音声の音圧差を利用することで、ソナーの選択的注意方向(C,青矢印)を計測することができる。ソナーの選択的注意方向の推移を見ると、獲物1にアタックする前から獲物2の方向にソナーの選択的注意を向けていることが分かる。
図3 計測したコウモリの飛行軌跡から飛行の選択的注意をパラメータ推定した結果(A,C)と数値シミュレーションの例(B,D)
獲物1の捕食から獲物2の捕食までの時間(捕食時間間隔)が長い際は、0.5π付近(獲物1)に選択的注意が集中していることが分かる(A,灰色のヒストグラム)。獲物1に注意を集中している際の飛行ルートは、数値シミュレーションの例(B)で示すように、獲物1を捕食するまでの軌道において獲物2の影響を受けない。一方で、捕食時間間隔が短い際は(C)、第二または第四象限に注意が集中しており、これは獲物2の影響を受けた軌道を選択していたことを意味する。例えば、選択的注意が第二象限に集中した際は、数値シミュレーションの例(D)で示すように、獲物2から離れるような軌道を描きながら獲物1に接近する。
さらに、AとCのヒストグラムの背景に示すカラーマップは、数値シミュレーションにより求めた捕食成功率分布を示しており、成功率が高くなる最適な注意の割合(赤)とコウモリの飛行軌跡から推定した選択的注意(灰色のヒストグラム)が、捕食時間間隔が短い場合に合致していることが分かる(C)。これらの結果は、コウモリが目前の獲物だけでなくその次の獲物に対しても注意を分散させることで、高確率で獲物を連続的に捕らえることが可能な飛行ルートを選択していたことを示している。
<用語解説>
- 注1) ソナー
- 音によって物体を探知また測距する技術。SONAR(SOund NAvigation and Ranging)の頭字語。
- 注2) マイクロホンアレイ
- 複数のマイクロホンを配列(array)した装置。マイクロホン間の音の到達時間差を利用して、音源座標の位置を高精度で計測することができる。
- 注3) 軌道計画
- 目標までに無数に存在する軌道から、1つの軌道を計画すること。
- 注4) 選択的注意
- 複数存在する感覚情報から、特定の情報のみを選択して認知すること。
- 注5) アクティブセンシング
- 行動しながら観測(センシング)を行うことで、ここではコウモリが自ら超音波信号を発し、そのエコーを聞くことで能動的に外界の情報をセンシングする様子を指す。これに対して、パッシブセンシングとは受動的な感覚を利用したセンシングを言う。
<論文情報>
| タイトル |
“Echolocating bats use future-target information for optimal foraging”
(コウモリは最適採餌のために次の標的の情報を利用する) |
| 著者名 |
Emyo Fujioka, Ikkyu Aihara, Miwa Sumiya, Kazuyuki Aihara and Shizuko Hiryu
(藤岡 慧明、合原 一究、角谷 美和、合原 一幸、飛龍 志津子) |
| 掲載誌 |
Proceedings of the National Academy of Sciences of the United States of America
(米国科学アカデミー紀要) |
| doi |
10.1073/pnas.1515091113 |
<お問い合わせ先>
<研究に関すること>
藤岡 慧明(フジオカ エミョウ)
同志社大学 研究開発推進機構 助手
Tel & Fax:0774-65-6364
E-mail:
飛龍 志津子(ヒリュウ シヅコ)
同志社大学 生命医科学部 准教授/JST さきがけ研究員
Tel & Fax:0774-65-6364
E-mail:
合原 一幸(アイハラ カズユキ)
東京大学 生産技術研究所 教授
Tel:03-5452-6691 Fax:03-5452-6692
E-mail:
<JST事業に関すること>
松尾 浩司(マツオ コウジ)
科学技術振興機構 戦略研究推進部 ICTグループ
〒102-0076 東京都千代田区五番町7 K’s五番町
Tel:03-3512-3525 Fax:03-3222-2066
E-mail:
<報道担当>
同志社大学 広報部 広報課
〒602-8580 京都府京都市上京区今出川通烏丸東入
Tel:075-251-3120 Fax:075-251-3080
E-mail:
東京大学 生産技術研究所 総務課 総務・広報チーム
〒153-8505 東京都目黒区駒場4-6-1
Tel:03-5452-6017 Fax:03-5452-6071
E-mail:
科学技術振興機構 広報課
〒102-8666 東京都千代田区四番町5番地3
Tel:03-5214-8404 Fax:03-5214-8432
E-mail: