 |

|
 生物型飛行の力学シミュレータの構築 生物型飛行の力学シミュレータの構築 |
|
|
劉 浩 (りゅう ひろし)
千葉大学 工学部電子機械工学科 教授
|
|
|
【研究課題概要】
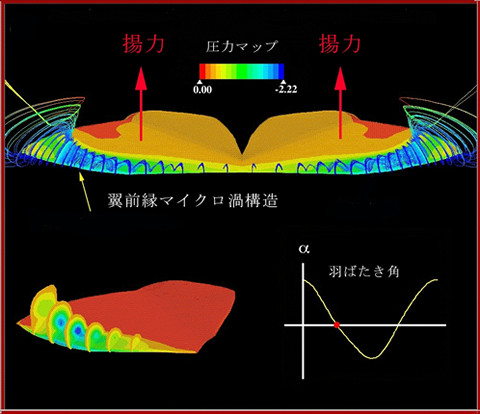
これまで昆虫の飛行メカニズムの研究は、羽ばたきロボットを用いて行われていますが、静止飛行に限られており、急旋回などの自由飛行については未解決のままです。本研究は昆虫の羽ばたき飛行を厳密な幾何学、運動学及び力学のモデルに基づき解析し、静止・前進・旋回を含むすべての自由飛行を再現できるシミュレータの構築を目指すものです。本研究成果のシミュレータを使うことで、小型飛行体の研究開発に革新的な設計指針や技術提供を行うことが期待されます。 |
 |
|
 |
|
|
|
 |
 |
|
