浮田 宗伯
(奈良先端科学技術大学院大学 情報科学研究科 助手)
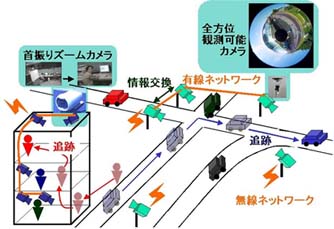
柔軟なユビキタスカメラ環境の構築と広範囲対象追跡への応用

http://ai-www.aist-nara.ac.jp/people/ukita/index-j.html
代表的論文:
T. Matsuyama and N. Ukita:
``Real-Time Multi-Target Tracking by a Cooperative Distributed Vision System'',
Proceedings of the IEEE, Vol.90, No. 7, pp.1136-1150, 2002. (Invited Paper)
講演:
N. Ukita and T. Matsuyama:
``Real-Time Cooperative Multi-Target Tracking by Communicating Active Vision Agents'',
Proc. of 6th International Conference on Information Fusion, Vol.1, pp.439-446, 2003. (Invited Talk)