

バイオニックヒューマノイドが拓く
新産業革命
新産業革命
プログラム・マネージャー
原田 香奈子 Kanako Harada
原田 香奈子 Kanako Harada
2001年 東京大学大学院 博士前期課程修了
2001-2004年 株式会社日立製作所
2005-2007年 (財)医療機器センター 流動研究員
2007年 早稲田大学大学院 博士後期課程修了 博士 (工学)
2007-2010年 イタリア聖アンナ大学院大学 博士研究員
2010-2012年 東京大学大学院 特任助教
2012-2015年 東京大学大学院 特任講師
2015- ImPACTプログラム・マネージャー
(2016- 東京大学 准教授、東大/JST間のスプリット・アポイントメント、エフォート90%)
2001-2004年 株式会社日立製作所
2005-2007年 (財)医療機器センター 流動研究員
2007年 早稲田大学大学院 博士後期課程修了 博士 (工学)
2007-2010年 イタリア聖アンナ大学院大学 博士研究員
2010-2012年 東京大学大学院 特任助教
2012-2015年 東京大学大学院 特任講師
2015- ImPACTプログラム・マネージャー
(2016- 東京大学 准教授、東大/JST間のスプリット・アポイントメント、エフォート90%)
【プロフィール】
大学・企業・病院・海外での研究経験を有し,医療機器審査や標準化にも携わる。工作機械やロボットの国際共同研究プロジェクトのマネジメント経験あり。
大学・企業・病院・海外での研究経験を有し,医療機器審査や標準化にも携わる。工作機械やロボットの国際共同研究プロジェクトのマネジメント経験あり。
What's New
2019/1/11[プレスリリース]
世界で最も精巧な頭部3次元CGデータを開発 ~脳神経外科医の解剖学的知識を可視化~
2019/1/11[プレスリリース]
微細手術に適用可能な低侵襲手術支援ロボットの開発 ~「バイオニックヒューマノイド」活用により世界最高水準のロボットを実現~
2019/1/11[プレスリリース]
緑内障手術練習用の眼球モデルを開発 ~ヒトの強膜の感触を忠実に再現~
2018/10/22[ニュース]
「バイオニックヒューマノイドが拓く新産業革命」公開シンポジウム 最終報告会 開催
2017/6/26[ニュース]
公開シンポジウム「バイオニックヒューマノイドが拓く新産業革命」 開催
研究開発プログラムの概要
ヒトに関わる機器の研究開発・評価・教育・訓練では、感覚的表現が多用され、試行錯誤も多いため、革新的技術シーズが社会に届くまでに時間がかかる。本プログラムではセンサーを内蔵した精巧な偽物を使って感覚的な表現を定量的に理解し、試行錯誤をなくすことで、技術シーズを早く社会に届けることを提案する。まずは医療から挑戦し、ヒトや実験動物の代わりとなるセンサー付精巧人体モデル「バイオニックヒューマノイド」を開発する。これを活用することで、技術シーズであるロボット技術を用いたスマートアームを開発し、小さな穴から精密な手術を行うという医療革命を具現化する。成果を他の産業に展開することで新産業革命をおこす。 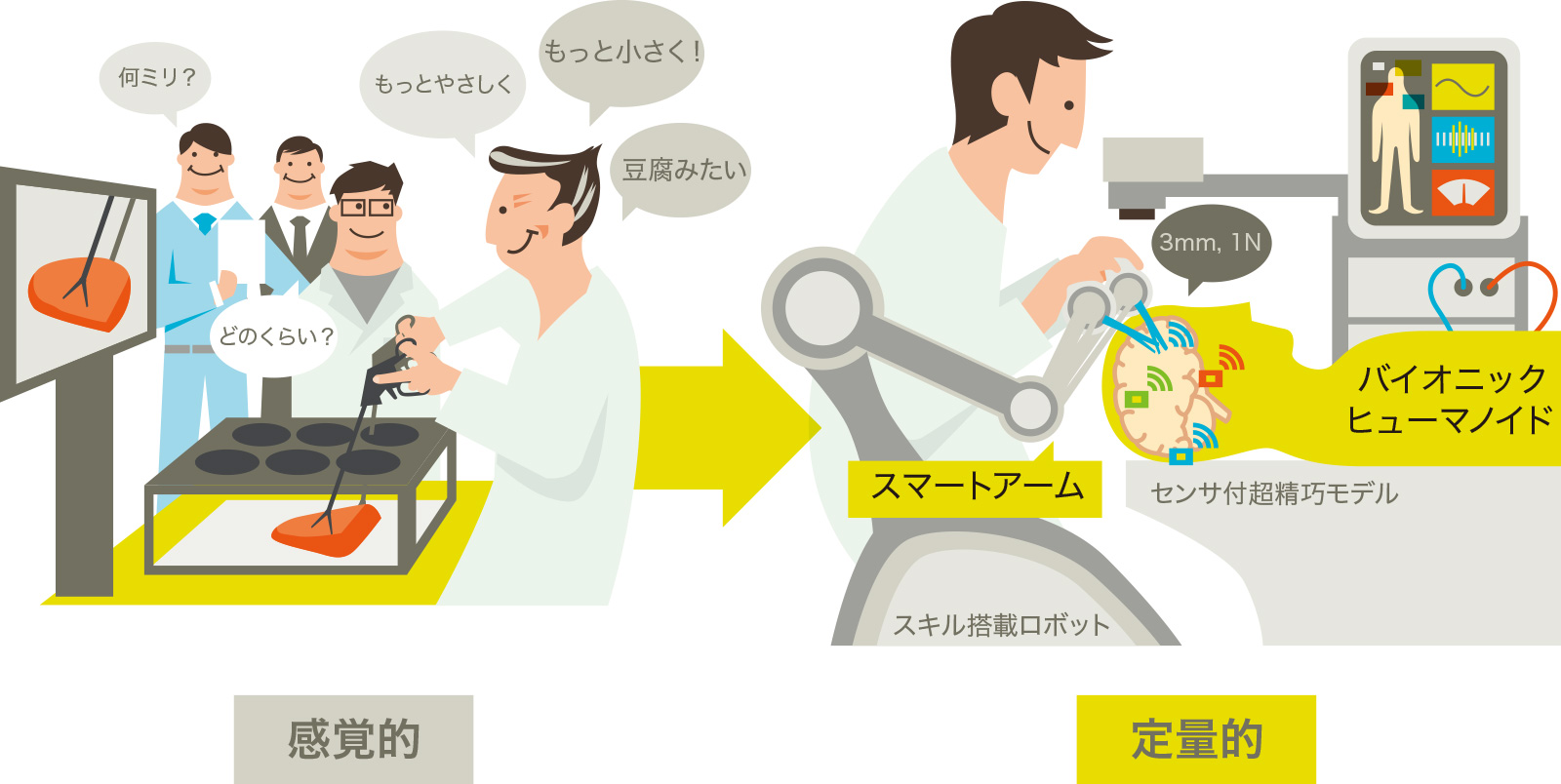
非連続イノベーション
ブレークスルーとなるポイント
社会的インパクトが大きい医療から挑戦
- ヒトや実験動物の代わりに使えるプラットフォームとして、
・センサ付の精巧な人体モデル「バイオニックヒューマノイド」 - 革新的技術シーズの実装による社会革命の具現化として、
・シーズの実装:匠ロボット「スマートアーム」
・医療革命:小さな穴(鼻や切開口)から超精密な治療
「センサ付精巧モデルの活用による革新的技術シーズの社会実装」を医療以外にも展開して社会変革を起こし、新産業革命をおこす。
PMの挑戦と実現した場合のインパクト
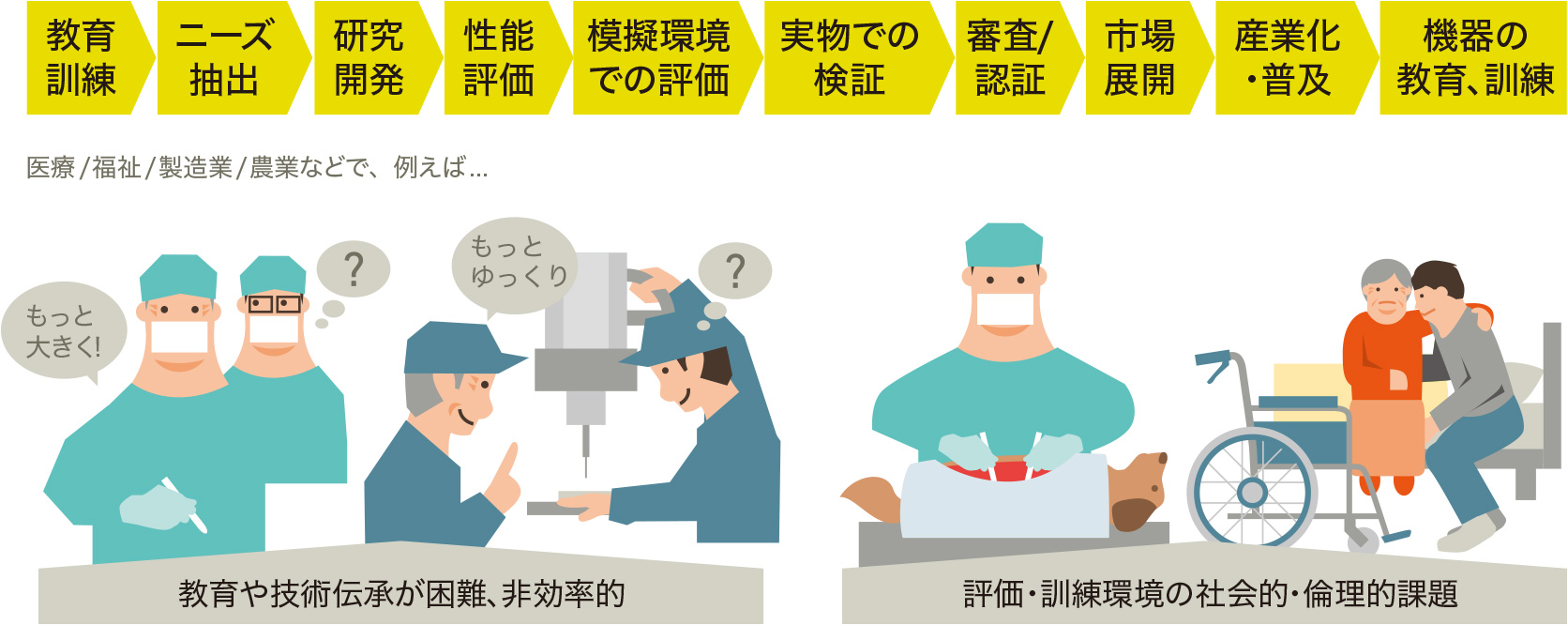
概要・背景
- 革新的技術シーズが実用化され社会に届くまでに時間がかかる。
- 特にヒトに関わる機器の研究開発・評価・教育・訓練のプロセスでは、感覚的表現が多用され、試行錯誤的、非効率的である。
- 実物の代わりに使える「センサ付の精巧な偽物」を作ることで,感覚的表現を定量的に理解し、試行錯誤を減らして、プロセスを加速する。センサ付の精巧な人体モデル「バイオニックヒューマノイド」を開発し構想を具現化する。
実現したときに産業や社会に与えるインパクトは何か?
- 定量的、倫理的。効率的な研究開発・評価・教育・訓練を実現し、イノベーションを加速する。
- 構想や要素技術を広く産業に展開し、新産業革命をおこす。
成功へのシナリオと達成目標
成功に導く解決手段(アプローチ)
- 計測、加工、材料、ロボットの世界トップレベル研究者を結集して技術的な障壁を突破。医学、医療機器関連学会及び標準化団体と早期連携し時間的・制度的障壁を突破。
マネジメント戦略
- 実施機関同士の綿密な共同研究なしでは達成できない目標設定。
- 確実な技術開発は大企業に、チャレンジは大学や中小企業に。
達成目標
- 特に頭部の構造(厚さ3~600 μmの膜など)を人工物で精密に再現したバイオニックヒューマノイドを開発する。
- スマートアーム(操作中の繰返位置決め精度10μm、遅れ100 ms未満)を開発し、模擬手術を実施して医療革命の可能性を示す。
リスク
- 成果の標準化・産業化における時間的リスクを考慮し、要素技術としての産業展開を積極的に推進する。
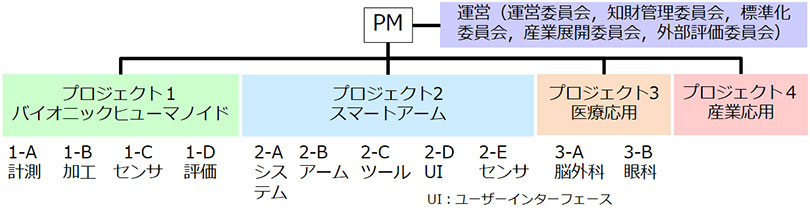
PMが作り込んだ研究開発プログラムの全体構成
Pj.1 バイオニックヒューマノイド 感覚的に表現される臓器の特性を計測し、センサを埋め込んだ人工物で再現
Pj.2 スマートアーム 産業用ロボットをベースに、人の近くで使えるような安全かつ知的な匠ロボットを開発
Pj.3 医療応用 サンプル等の提供,試作品の評価と活用
Pj.4 産業応用 医療以外の産業応用
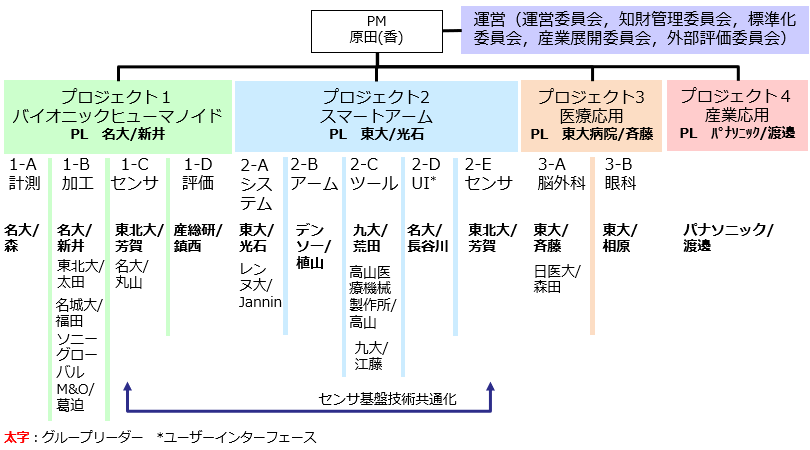
PM自らのキャスティングによる実施体制
実施体制のポイント
- 工学系研究者、医師、企業の綿密な連携体制を構築する。
- PM、PM補佐、及びPLを主参加者とする少人数の運営会議を行い、迅速かつ柔軟な意思決定を行う。
機関選定の考え方
- ⾮公募指名:世界トップの⾼度な技術を有し、有力な原動⼒となる機関は指名する。
- 公募指名:新規のニーズに対しては、公募により広くアイディアを募集し、適切な研究機関を採⽤する。
マネージメント体制
内閣府 革新的研究開発推進プログラム
ImPACTプログラム・マネージャー
原田 香奈子 Kanako Harada
ImPACTプログラム・マネージャー
原田 香奈子 Kanako Harada
PM補佐(研究開発マネジメント担当)
三好 正信 Masanobu Miyoshi
三好 正信 Masanobu Miyoshi
PM補佐(研究開発マネジメント担当)
小林 裕紀 Yuki Kobayashi
小林 裕紀 Yuki Kobayashi
PM補佐(研究開発マネジメント担当)
小野 春彦 Haruhiko Ono
小野 春彦 Haruhiko Ono
PM補佐(運営担当)
松井 正宏 Masahiro Matsui
松井 正宏 Masahiro Matsui
| プロジェクト名 | 研究開発機関名 | 研究開発責任者 |
|---|---|---|
| 1-A 計測 | 名古屋大学 |
森 健策 |
| 1-B 加工 | 名古屋大学 |
新井 史人 |
名城大学 |
福田 敏男 |
|
東北大学 |
太田 信 |
|
ソニーグローバルマニュファクチャリング&オペレーションズ株式会社 |
葛迫 淳一 |
|
| 1-C センサ | 東北大学 |
芳賀 洋一 |
名古屋大学 |
丸山 央峰 |
|
| 1-D 評価 | 産業技術総合研究所 |
鎮西 清行 |
| 2-A システム | 東京大学 |
光石 衛 |
レンヌ大学 |
Pierre JANNIN |
|
| 2-B アーム | 株式会社デンソー |
植山 剛 |
| 2-C ツール | 九州大学 |
荒田 純平 |
株式会社 高山医療機械製作所 |
高山 隆志 |
|
九州大学 |
江藤 正俊 |
|
| 2-D UI | 名古屋大学 |
長谷川 泰久 |
| 2-E センサ | 東北大学 |
芳賀 洋一 |
| 3-A 脳外科 | 東京大学 |
齊藤 延人 |
日本医科大学 |
森田 明夫 |
|
| 3-B 眼科 | 東京大学 |
相原 一 |
| 4 Pain-Sensing Dummy | パナソニック株式会社 |
プログラム資料
掲載の記事・写真・図表など無断転載を禁止します。
Copyright © 2014 Impulsing Paradigm Change through Disruptive Technologies Program/ Cabinet Office, Government of Japan. All Rights Reserved.