

Tough Robotics Challenge (TRC)
Program Manager
Satoshi Tadokoro
Satoshi Tadokoro
1984 M‐Eng., Univ. of Tokyo
1993‐2005 Associate Professor, Kobe Univ.
2002 Established International Rescue System Institute
2002 ‐2006 MEXT DDT Rescue Robotics PM
2005‐ Professor, Graduate School of Information Sciences, Tohoku Univ.
2006 ‐2010 NEDO Strategic Advanced Robot Component PI
2011 Deployed Quince for the Fukushima‐Daiichi Accident
2012 Assistant Dean, 2014 Vice Dean
2014 IEEE Robotics and Automation Society President-Elect
2014 – ImPACT Program Manager
(Joint appointment between Tohoku University and JST; Effort: 80%)
1993‐2005 Associate Professor, Kobe Univ.
2002 Established International Rescue System Institute
2002 ‐2006 MEXT DDT Rescue Robotics PM
2005‐ Professor, Graduate School of Information Sciences, Tohoku Univ.
2006 ‐2010 NEDO Strategic Advanced Robot Component PI
2011 Deployed Quince for the Fukushima‐Daiichi Accident
2012 Assistant Dean, 2014 Vice Dean
2014 IEEE Robotics and Automation Society President-Elect
2014 – ImPACT Program Manager
(Joint appointment between Tohoku University and JST; Effort: 80%)
Profile
Awarded METI Robot Award, FDMA Commissioner Award, etc.
Awarded METI Robot Award, FDMA Commissioner Award, etc.
What's New
2017/12/25[Press Release]
2017/10/17[Press Release]
2017/6/19[Press Release]
Overview
Japan is one of the most disaster-prone countries in the world. A large-scale earthquake is predicted to occur directly beneath the Tokyo metropolitan area in the near future, and there is an urgent need for measures to reduce the risk. Although the usefulness of robots in a disaster was recognized during the Great East Japan Earthquake, robots that can actually be used in unknown extreme environments where the situation is always changing are still a work in progress. The goal of this program is to develop essential technologies for remote autonomous robots that are tough and can function without faltering even in an extreme disaster conditions. At the same time, this research provides key fundamental technologies for outdoor service robots for establishing foundation of the future advanced outdoor robot services. 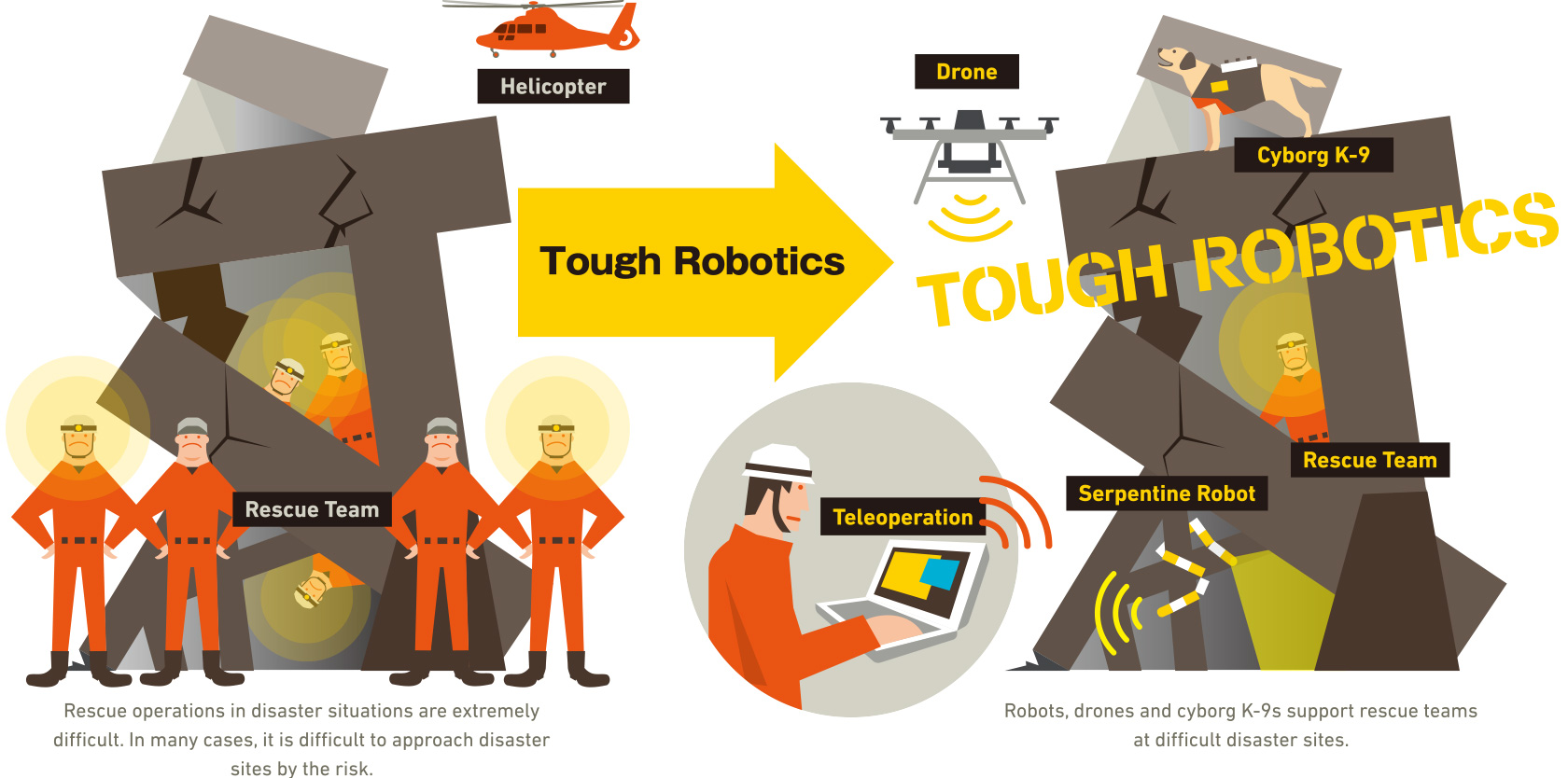
Disruptive Innovation
Keys to breakthrough
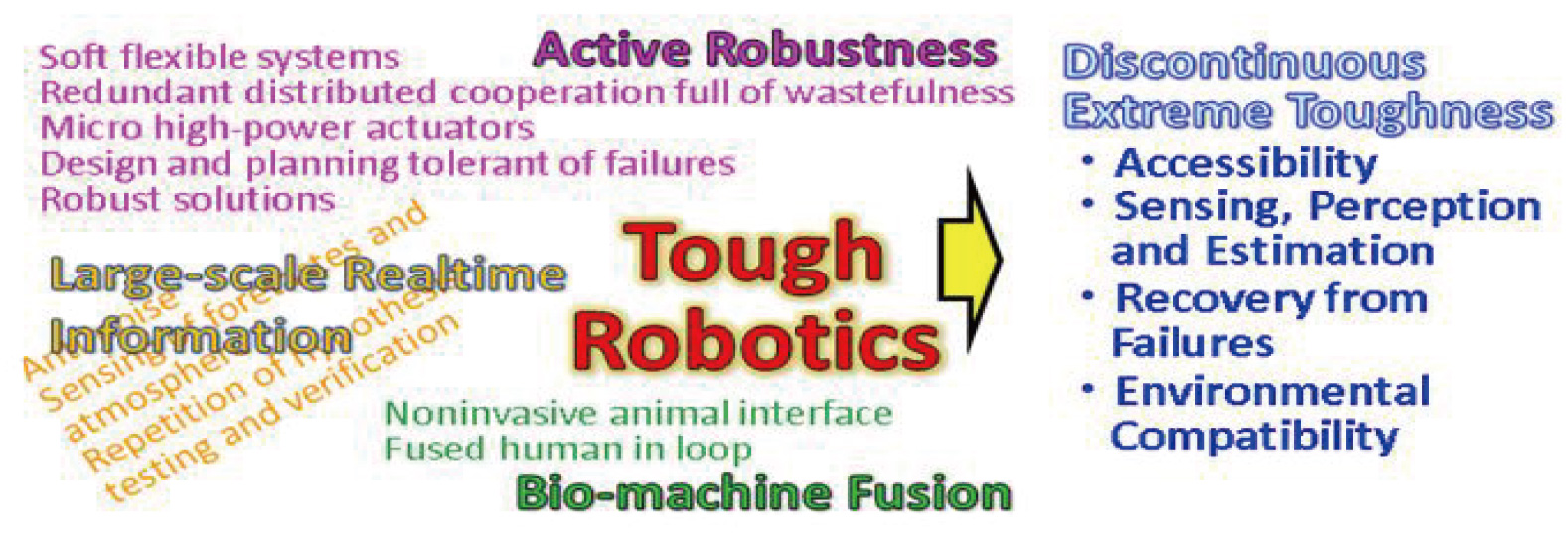
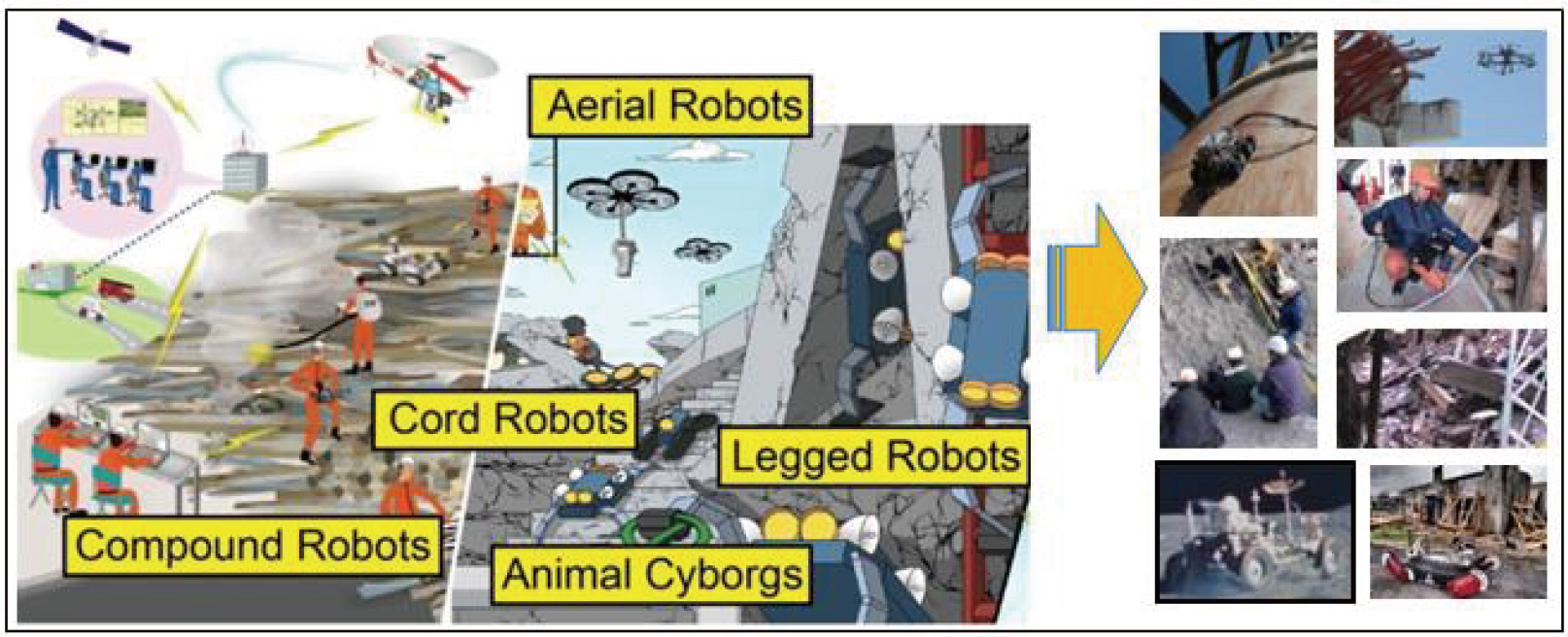
- Advance three technologies of active robustness, large-scale real time information, and bio-machine Fusion. Integration with five types of robot bodies. Establish remote autonomous robotics that can operate robustly in extreme environments, implement commercialization and create a foundation for social implementation.
The Challenges for the PM and the Impact of Success
Overview of TRC
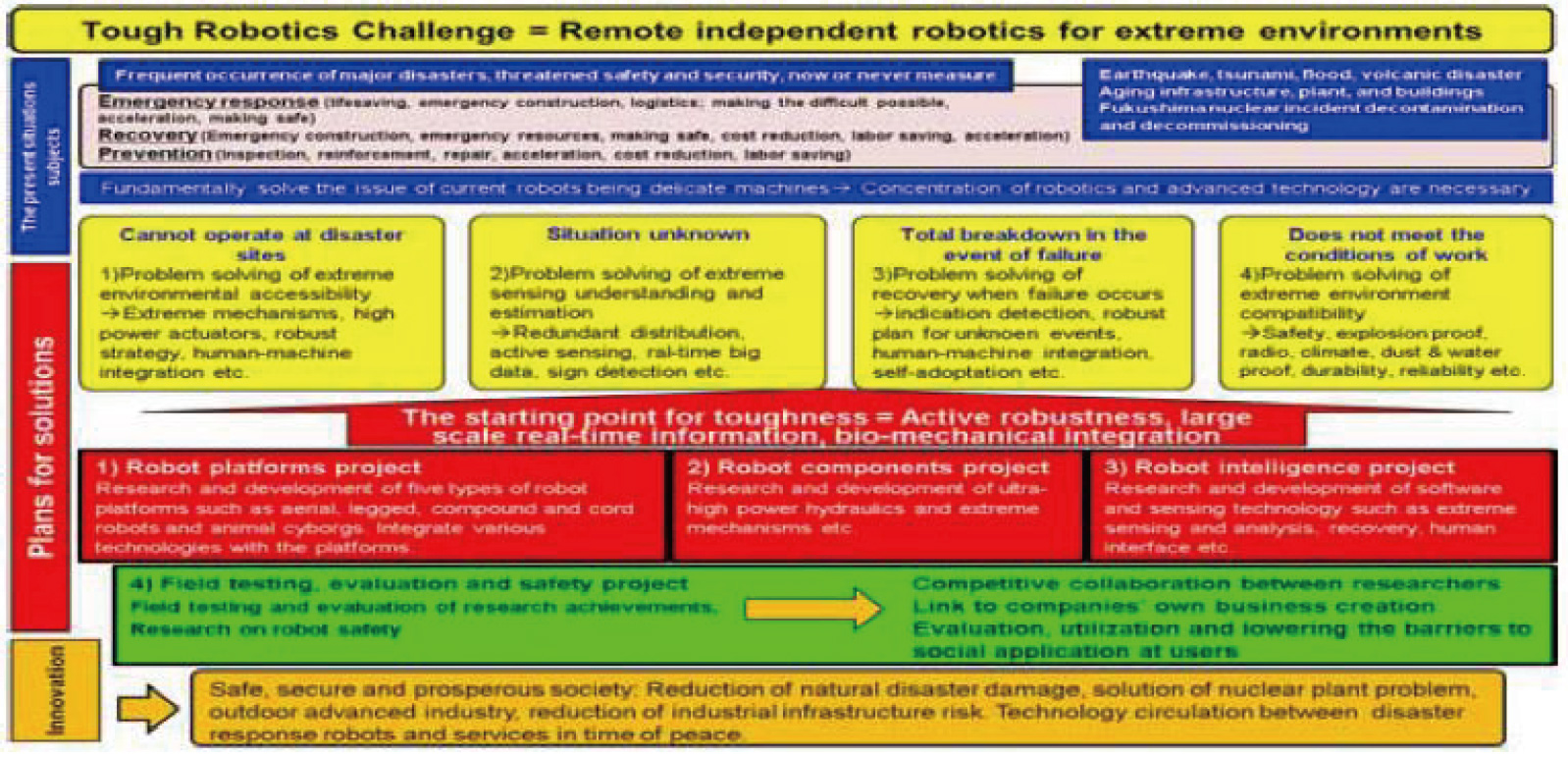
- Jointly research and develop the key fundamental technologies for outdoor robots (accessibility, sensing and perception, recovery from failure, and environmental compatibility) in a cooperative competitive environment, with the aim of achieving remote autonomous robots that can work robustly without faltering even in the unknown, time-varying extreme disaster environments. Conduct focused field evaluations to make robot technologies and their performance visible, and lower the barriers to social application.
Background
- In recent years, large scale disasters have occurred frequently. Application of robot technologies to improving disaster response, recovery, preparedness and mitigation capabilities, improving efficiency, and at the same time ensuring the safety of responders is an urgent issue. However, current robots are delicate goody-goodies that cannot show the same performance of work in the extreme environment of disasters as they can indoors. Their ability to respond to unexpected situations is low.
Impact on industry and society in the event of achievement
- Application of robots to emergency response, recovery, preparedness and mitigation of disasters to contribute the world safety and security. Furthermore, pave the way to commercialization of advanced outdoor robot services by promoting technology spillover.
Scenario for Success and Achievement Targets
Achievement targets
- Technical target: Establish tough robotics that is fully capable even in a disaster environment.
- Industrial target: Create a new business for component service robots. Disaster robot technology and business environment.
- Social target: Provide disaster mitigation solutions that enable information gathering and work under environmental conditions that hitherto has been impossible.
Scenario for success
- Conduct research into active robustness, large-scale real time information, bio-machine fusion. Systemically integrate the solution into five types of robot bodies and evaluate the systems in a simulated disaster field. Promote modest competition between researchers and voluntary information exchange through the field evaluation. Encourage fundamental research that meets user needs by reflecting the user opinions in the research planning. Seek integration with the companies' own business plans through business matching, as well as the disaster prevention applications.
Overall R&D Program Structure Created by the PM
Key points of implementation
- Create mechanisms that promote win‐win cooperation between all of the participants including researchers, companies and users.
- Identify disaster application scenarios and maximize the outputs through review and exploration of the research content.
- Promote business matching actively reflecting user and company needs, using field testing & evaluation and joint research.
- Encourage and support utilization and commercialization of ImPACT research fruits.
- Periodically publicize the field testing and evaluation meetings and make the research achievements visible.
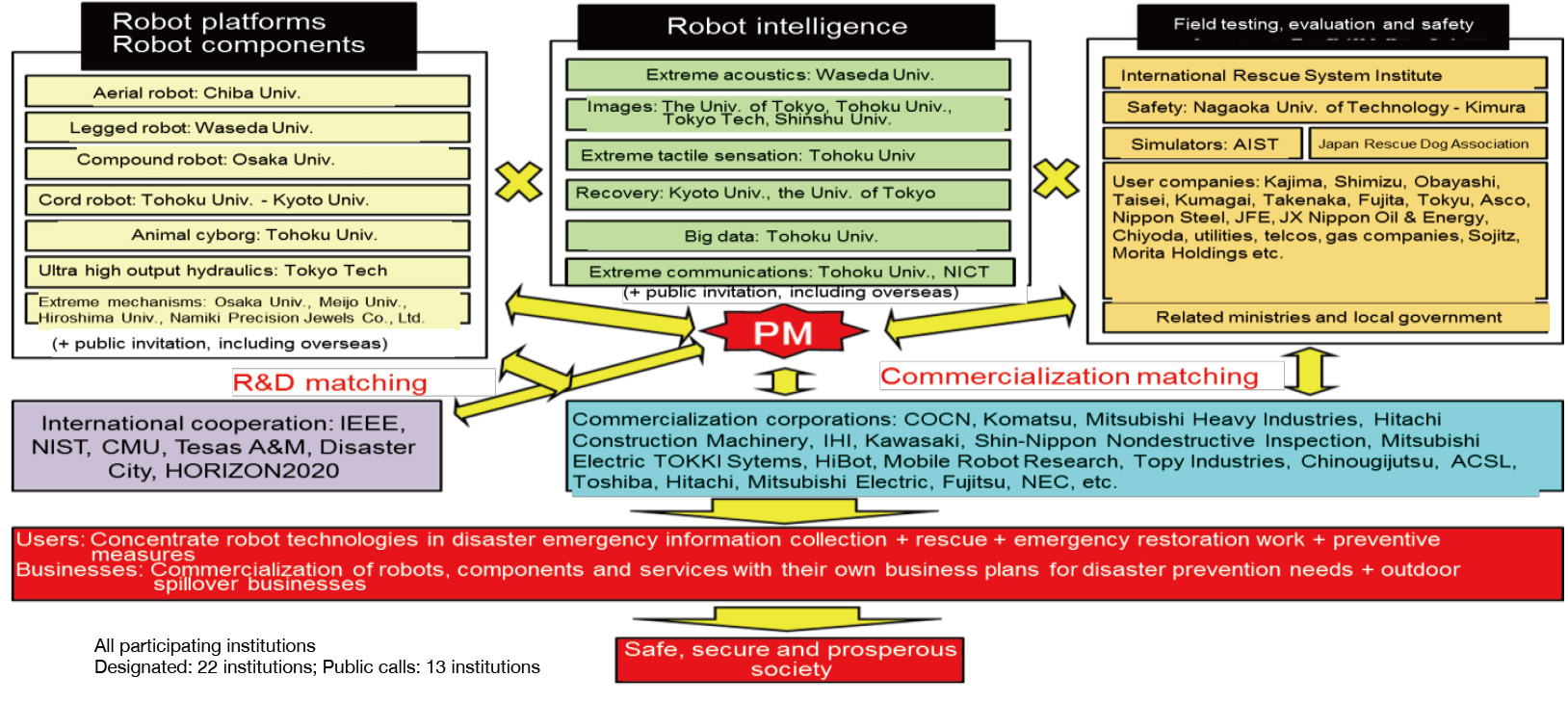
Implementation Structure as Assembled by the PM
Keys of the implementation structure
- Integrate five types of robot body developed in the platform project with the hardware developed in the component project and the software and sensing technologies developed in the intelligence project. They are evaluated in the field testing, evaluation and safety project, seeking to match the research fruits with users and business operators.
Approach to selection of researchers and institutions
- Invitations for participation have been sent to top-class research organizations in Japan that are most likely to deliver R&D results in each technology field. Additionally, nascent technologies will be gathered through public calls and from overseas. Enthusiastic businesses will commercialize the output.
Organization
The Cabinet Office
ImPACT: Impulsing Paradigm Change through Disruptive Technologies Program
ImPACT Program Manager
Satoshi Tadokoro
ImPACT: Impulsing Paradigm Change through Disruptive Technologies Program
ImPACT Program Manager
Satoshi Tadokoro
Associate Program Manager
Toyohito Uchizono
Toyohito Uchizono
Unauthorized copying and replication of the contents of this site, text and images are strictly prohibited. All Rights Reserved.
Copyright © 2014 Impulsing Paradigm Change through Disruptive Technologies Program/ Cabinet Office, Government of Japan. All Rights Reserved.