- JST トップ
- /
- 戦略的創造研究推進事業
- /
 ERATO
ERATO- /
- 研究領域の紹介/
- 終了領域/
- 吉田ナノ機構プロジェクト
吉田ナノ機構プロジェクト

総括責任者 吉田 庄一郎
((株)ニコン 専務取締役)
研究期間:1985年10月~1990年9月
先端技術の急速な発展に伴い微細化・精密化技術はナノメータ(10-9m)領域へ入り込んできました。このプロジェクトでは、ナノメータで物を計測、制御、加工する手法を探索し、それを可能とする機械・機構の要素技術について研究を行いました。
研究により、1ナノメータでの位置決めを可能とする超精密位置制御システムを実現し、半導体技術や精密加工技術などの広い分野での応用が期待されています。また、二波長レーザー測長装置により空気のゆらぎの影響を除去しナノメータオーダの測長を可能としました。さらに、加工表面や生物試料を観察するためのSEM-STM複合装置の作製、粒子ビームによる超平滑面の加工手法の開発、高反射率X線光学多層膜の作製などの基盤技術を確立し、ナノテクノロジーともいうべき新しい分野を切り拓くことに大きく貢献しました。
成果
ナノメータ位置制御システムの実現
AC同期型リニアモータとボールローラーガイドを用いて分解能 1nm 以上の位置決めシステムを完成した。
ナノメータ測長システムの試作
2つの波長のレーザー光を用い、空気のゆらぎの影響を除去できる二波長レーザー干渉計を考案し、分解能 0.76nm の計測を可能とした。
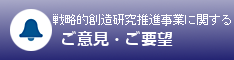
X線多層膜の作成
高周波スパッタ法、および初めて光CVD法を用い、W/C多層膜を形成し、高い反射率を得ることに成功した。
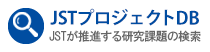
超平滑面の作製
低エネルギーの粒子ビームを照射することにより、原子レベルでの超平滑面の加工が可能となった。
SEM-STM複合装置の実現
走査型電子顕微鏡と走査型トンネル顕微鏡の複装置を完成し、試料と探針とを同時に観察できるようにし、STM観察部分の設定を0.5μm以内とすることが可能になった。
ツインローブSTMの作製
二つの探針を配置することにより、表面の原子移動現象の検出や、極く狭い領域の表面状態を検出することが可能となった。
▲スパッタエッチされたKish-Graphite表面のSTM像
▲多層膜の電子顕微鏡写真
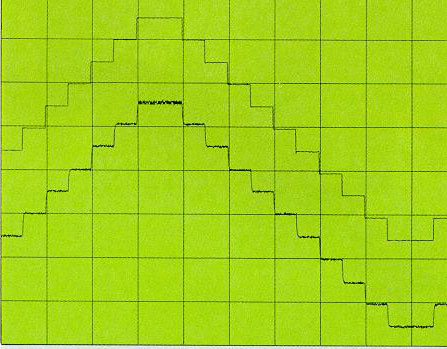
▲1nmのステップ応答